Difference between revisions of "Configuration/es"
(Updating to match new version of source page) |
|||
| (304 intermediate revisions by 2 users not shown) | |||
| Line 12: | Line 12: | ||
El software de configuración Spirit está disponible para los siguientes sistemas operativos:<br /> | El software de configuración Spirit está disponible para los siguientes sistemas operativos:<br /> | ||
| − | *Microsoft Windows | + | *[[Spirit Settings under Windows|Microsoft Windows]] |
| − | *Apple OS | + | *[[Spirit Settings under Mac|Apple Mac OS]] |
| − | *GNU/Linux | + | *[[Spirit Settings under Linux|GNU/Linux - Ubuntu, Debian and more]] |
*FreeBSD | *FreeBSD | ||
Una vez se establezca la conexión y se instale el controlador con éxito aparecerá un nuevo puerto COM virtual en el administrador de dispositivos de su ordenador. | Una vez se establezca la conexión y se instale el controlador con éxito aparecerá un nuevo puerto COM virtual en el administrador de dispositivos de su ordenador. | ||
| − | + | Please install software and USB driver according guide. | |
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
=== WIFI-LINK === | === WIFI-LINK === | ||
| − | El software de configuración Spirit puede ahora utilizar un módulo Wifi. Dicho dispositivo ''Spirit [[Wifi-Link]]'' | + | El software de configuración Spirit puede ahora utilizar un módulo Wifi. Dicho dispositivo ''Spirit [[Wifi-Link]]'' puede reemplazar completamente la interfaz usb. Así el usuario puede realizar todos los ajustes de manera inalámbrica. Puede encontrar ayuda para su conexión en la página del [[Wifi-Link]]. |
== CONEXION CON LA UNIDAD == | == CONEXION CON LA UNIDAD == | ||
| Line 50: | Line 40: | ||
== INSTALACION DEL SOFTWARE DE CONFIGURACION == | == INSTALACION DEL SOFTWARE DE CONFIGURACION == | ||
| − | + | Below are the installation instructions for the supported platforms. | |
| − | [ | + | The configuration software is available on the Spirit System website: [https://spirit-system.com/ spirit-system.com]. |
| − | + | ==== MICROSOFT WINDOWS ==== | |
Ejecute el instalador y siga el asistente. | Ejecute el instalador y siga el asistente. | ||
Si el controlador no está instalado todavía, se le dará la opción de hacerlo durante el proceso de instalación. | Si el controlador no está instalado todavía, se le dará la opción de hacerlo durante el proceso de instalación. | ||
El instalador pasa por todos los pasos necesarios para preparar el equipo para ejecutar el software de configuración. Una vez finalizado el proceso de instalación, el software de configuración se podrá iniciar desde el escritorio o desde el listado de programas, „Spirit Settings“. | El instalador pasa por todos los pasos necesarios para preparar el equipo para ejecutar el software de configuración. Una vez finalizado el proceso de instalación, el software de configuración se podrá iniciar desde el escritorio o desde el listado de programas, „Spirit Settings“. | ||
| − | Para más información sobre la instalación, ejecución y resolución de problemas de Spirit Settings vaya a la página [[Spirit Settings under Windows|Spirit | + | Para más información sobre la instalación, ejecución y resolución de problemas de Spirit Settings vaya a la página [[Spirit Settings under Windows|Ajuste del Spirit bajo Windows]] |
| − | + | ==== APPLE MAC OS ==== | |
| − | + | Install the downloaded software by opening the DMG file and then moving the | |
| + | content to your Desktop or Application folder. Configuration software can be launched with “Spirit-Settings“ icon. | ||
| − | + | For detailed guide for Spirit Settings installation, launching and troubleshooting open [[Spirit Settings under Mac|Spirit Settings under Mac]] page. | |
| + | |||
| + | ==== GNU/LINUX and FreeBSD ==== | ||
Extraiga todos los ficheros desde el fichero comprimido descargado, por ejemplo en su carpeta de inicio. | Extraiga todos los ficheros desde el fichero comprimido descargado, por ejemplo en su carpeta de inicio. | ||
El Software de Configuración se puede iniciar desde el directorio recién creado ejecutando el archivo „settings.sh“. | El Software de Configuración se puede iniciar desde el directorio recién creado ejecutando el archivo „settings.sh“. | ||
| − | La guía de instalación para Linux Mint (o compatible) se encuentra en la página [[Spirit Settings under Linux|Spirit | + | |
| + | La guía de instalación para Linux Mint (o compatible) se encuentra en la página [[Spirit Settings under Linux|Ajuste del Spirit bajo Linux]]. | ||
| Line 75: | Line 69: | ||
Inicie Spirit Settings desde su escritorio o en la carpeta donde fue instalado. | Inicie Spirit Settings desde su escritorio o en la carpeta donde fue instalado. | ||
| − | {{Info|[[File:Info.png]] | + | {{Info|[[File:Info.png]] The configuration software should be started '''AFTER''' the unit has initialized. |
| − | + | Whenever the Spirit FBL is initialized (status LED is steady On) and connected, you can | |
| − | + | make adjustments to the settings. | |
| + | Configuration during flight is not possible due to the associated safety risks. | ||
}} | }} | ||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
== USO DEL SOFTWARE == | == USO DEL SOFTWARE == | ||
| Line 98: | Line 81: | ||
'''Asegúrese de ejecutar el software una vez la unidad se haya inicializado.''' | '''Asegúrese de ejecutar el software una vez la unidad se haya inicializado.''' | ||
| − | === | + | === CONNECTION (Conexión) === |
Esta pestaña indica el estado actual de la conexión, le informa acerca de la versión actual del firmware, muestra el número de serie de la unidad conectada y le permite cambiar el puerto COM. Además cuenta con un asistente para la configuración inicial de su unidad. | Esta pestaña indica el estado actual de la conexión, le informa acerca de la versión actual del firmware, muestra el número de serie de la unidad conectada y le permite cambiar el puerto COM. Además cuenta con un asistente para la configuración inicial de su unidad. | ||
| Line 117: | Line 100: | ||
'''Position (Orientación)'''<br /> | '''Position (Orientación)'''<br /> | ||
| − | Seleccione la orientación en la que la unidad fue montada | + | Seleccione la orientación en la que la unidad fue montada en el modelo. |
''(Vea la sección 3 - Instalación)'' | ''(Vea la sección 3 - Instalación)'' | ||
| Line 123: | Line 106: | ||
Seleccione el tipo de plato cíclico de su modelo. | Seleccione el tipo de plato cíclico de su modelo. | ||
En la mayoría de los casos es ''CCPM 120° o 120° CCPM (reversed).''<br /> | En la mayoría de los casos es ''CCPM 120° o 120° CCPM (reversed).''<br /> | ||
| − | {{Quote| | + | {{Quote|Se debe desactivar cualquier tipo de mezcla de plato de la emisora. Se ajustar a H1 (un servo por cada función).}} |
'''Receiver (Receptor)'''<br /> | '''Receiver (Receptor)'''<br /> | ||
Seleccione el tipo de receptor que está utilizando:<br /> | Seleccione el tipo de receptor que está utilizando:<br /> | ||
| − | *''PWM'' – receptor estándar.<br /> | + | *''PWM'' – receptor estándar (PWM).<br /> |
*''PPM'' – conexión mediante un único cable.<br /> | *''PPM'' – conexión mediante un único cable.<br /> | ||
| − | *''Spektrum DSM2/DSMX'' – Satélite DSM2 o DSMX.<br /> | + | *''Spektrum DSM2/DSMX'' – Satélite DSM2 o DSMX, o receptor SPM4649T.(para [[Spektrum Integration|Integración Spektrum]]).<br /> |
| − | *''Futaba S-BUS'' – receptor conectado via SBUS.<br /> | + | *''Futaba S-BUS'' – receptor conectado via SBUS. (para [[Futaba Telemetry|Telemetría Futaba]])<br /> |
| − | *''Jeti EX Bus'' – receptor conectado via EX Bus (para [[Jeti Integration|JETI | + | *''Jeti EX Bus'' – receptor conectado via EX Bus (para [[Jeti Integration|Integración JETI Model]]).<br /> |
*''SRXL/SUMD'' – receptor conectado via SRXL, SUMD, UDI. | *''SRXL/SUMD'' – receptor conectado via SRXL, SUMD, UDI. | ||
| + | *''SRXL2'' – receiver connected via SRXL2 (more details at [[Spektrum_SRXL2|Spektrum SRXL2]]). | ||
| + | *''FrSky F.Port'' – receiver connected via F.Port (more details at [[FrSky_FPort|FrSky F.Port]]). | ||
| + | |||
'''Flight style (estilo de vuelo)'''<br /> | '''Flight style (estilo de vuelo)'''<br /> | ||
Ajusta como se comportará el modelo en vuelo. | Ajusta como se comportará el modelo en vuelo. | ||
| − | Este parámetro se utiliza para ajustar y adaptar el comportamiento en vuelo según | + | Este parámetro se utiliza para ajustar y adaptar el comportamiento en vuelo según los requisitos del piloto. Tiene gran impacto en maniobras de cíclico per no en maniobras basadas en cola. |
| + | Este parámetro no influye en la estabilidad. Cuanto más grande es el modelo, es recomendable ajustarlo a un valor más alto. | ||
| − | + | Valores bajos harán que el modelo se comporte de una manera más controlada y consistente y dará una sensación de control lineal y robótica. Puede aparecer un pequeño retardo en el control. El momento angular se mantendrá de manera más constante. | |
| − | + | ||
| − | + | Valores más altos llevan a un comportamiento más natural. La respuesta a los movimientos del stick será más parecida a la de un helicóptero con barra estabilizadora donde movimientos rápidos producen una respuesta más agresiva. Los movimientos en la zona central del stick serán más precisos. Puede ayudarle a hacer tic-tocs de manera más rápida. Podrá llegar de manera más rápida a los extremos de los recorridos del cíclico. | |
| − | + | El valor recomendado para la mayoría de los pilotos es: 4. | |
'''Channels (Canales)'''<br /> | '''Channels (Canales)'''<br /> | ||
| − | Después de hacer clic en el botón, se mostrará la ventana | + | Después de hacer clic en el botón, se mostrará la ventana de asignación de canales. |
| + | Aquí puede asignar cualquier canal a cualquier función. El número de canales disponibles depende del tipo de receptor. Recuerde asignar sólo un canal a cada función. | ||
| − | Cuando se asigna un canal para la función | + | Cuando se asigna un canal para la función de ''Throttle (motor)'', la salida de motor de la unidad se puede obtener de la posición AUX. |
| − | + | Si se asigna un canal para la función ''Bank'', se activará la función de conmutación de Bancos ''(véase el capítulo 5.6)''.<br /> | |
| − | + | Si no se asigna un canal para la función ''Gyro Gain'', es posible configurar la ganancia del giróscopo directamente a través de este programa en la pestaña Sensor. El canal que queda libre puede usarse para otra función, por ejemplo para conmutar entre los diferentes Bancos. | |
[[File:2_1en.png|center|500px]] | [[File:2_1en.png|center|500px]] | ||
| − | '''Failsafe | + | '''Failsafe'''<br /> |
| − | Para | + | Para tipos de receptor PPM, Spektrum DSM2/X, Jeti EX Bus, SRXL/SMUD puede ajustar el Failsafe directamente en la unidad. Los valores actuales se almacenarán como valores Failsafe inmediatamente al hacer click en el botón Set Failsafe. En caso de que la señal de control se pierda durante más de 1 segundo en vuelo, se aplicarán los valores establecidos. |
| − | Con otros tipos de | + | Con otros tipos de receptor, el Failsafe se ajusta desde la emisora o desde el propio receptor. |
| − | ''' | + | '''Realtime tuning (Ajuste en tiempo real)'''<br /> |
| − | Mediante la asignación de un parámetro '' ( | + | Mediante la asignación de un parámetro '' (P) '', es posible cambiar los ajustes directamente desde su emisora. |
| + | Puede ajustar dicho parámetro de una manera muy cómoda cambiando el valor del canal correspondiente (por ejemplo mediante un potenciómetro). | ||
| + | Por lo cual, no necesitará el software de configuración para ello. Con su emisora será suficiente. | ||
| + | Un cambio en el canal correspondiente cambiará inmediatamente el valor del parámetro. El recorrido máximo del canal en la emisora ajustará el valor más alto a alcanzar en el parámetro, mientras que el recorrido mínimo ajustará el valor más bajo. | ||
| + | El ajuste de parámetros en tiempo real tiene la más alta prioridad en el ajuste final. Por lo cual, si se activa, el valor almacenado como ajuste en el software o el valor del Banco será ignorado. | ||
| − | Esta funcionalidad sólo | + | Esta funcionalidad sólo funciona si el software de configuración no está conectado. Esto evitará cualquier tipo de accidente. |
| + | Tan pronto como se desconecta el software, el parámetro seleccionado se configura por el valor del canal. | ||
| + | En caso de que el software se inicie de nuevo, mantendrá el valor de ajuste en tiempo real en su memoria. | ||
| + | Sin embargo, cuando se inicie el software, se aplicará el funcionamiento mencionado más arriba (el ajuste en tiempo real se desactivará y el valor se mantendrá intacto incluso si cambia de canal). | ||
| − | Puede configurar 3 parámetros | + | Puede configurar hasta 3 parámetros diferentes y simultáneos con esta función. |
| − | Si se asigna la función '' ( | + | Si se asigna la función '' (F) '', se activará cuando su valor sea igual a 1. |
| + | La función Vibration analysis (Análisis de Vibraciones) le permite medir las vibraciones durante el vuelo. Se describe más adelante en la sección Diagnostic (Diagnóstico). | ||
| − | Cuando la | + | Cuando termine la fase de ajuste, se recomienda utilizar el software para almacenar el ajuste decidido en la unidad. Después des-asigne el parámetro para que el valor no pueda ser modificado por error. |
| − | {{Info|[[File:Info.png]] Se recomienda | + | {{Info|[[File:Info.png]] Se recomienda tener siempre extrema precaución al realizar ajustes en vuelo para no perder el control del modelo! |
}} | }} | ||
| − | === DIAGNOSTIC | + | === DIAGNOSTIC (DIAGNOSTICO) === |
| − | Una vez que los ajustes de la | + | Una vez que los ajustes de la pestaña anterior se han terminado, se recomienda ahora hacer los ajustes y cambios necesarios en la emisora para que los controles coincidan con las salidas de la unidad mostradas. |
| − | El desgaste y las influencias ambientales | + | Generalmente, cada emisora es diferente y el centro de sus canales no suele ser exactamente el mismo. |
| − | Aquí, | + | El desgaste y las influencias ambientales pueden también afectar, haciendo que el centrado de los canales varíe. |
| + | Otro punto es el valor máximo y mínimo de cada canal. | ||
| + | Aquí, ajustará los límites mediante el ajuste de recorridos de servo de su emisora. | ||
[[File:3en.png|center|500px]] | [[File:3en.png|center|500px]] | ||
| − | {{Info|[[File:Info.png]] | + | {{Info|[[File:Info.png]] Para un correcto funcionamiento de la unidad, es necesario que el movimiento de cada canal se corresponda con en de las barras. La dirección del movimiento debe coincidir también. |
| − | + | ||
}} | }} | ||
| − | + | En segundo lugar, es necesario comprobar los valores de los canales alerón, elevador, paso y cola. Estos canales deben estar centrados en aproximadamente 0%. | |
| − | + | La unidad detecta automáticamente la posición neutral durante cada inicialización. | |
| − | + | <u>No utilice el ajuste de trim o subtrim en su emisora para estos canales,</u> ya que si no, la unidad Spirit los considerará como un comando. | |
| − | <u>No utilice el ajuste | + | |
| − | + | Asegúrese de que todos los ajustes subtrim y trim estén a cero. | |
| − | Pruebe | + | También se recomienda establecer los valores máximos y mínimos. Pruebe los recorridos mínimo y máximo para todos los canales, si estos valores no son iguales a -100% y 100% en la pestaña Diagnostic es necesario ajustar los recorridos de los canales de su emisora hasta corregirlo. |
| − | + | ||
| − | Después de estos ajustes, todo | + | Después de realizar estos ajustes, todo lo referente a la emisora debería estar configurado. |
| − | de los potenciómetros | + | Si algún canal oscila alrededor del centro, puede significar un desgaste de los potenciómetros de la emisora. Esto puede ser compensado incrementando el valor Stick deadband (zona muerta) en la pestaña ''Advanced'' (Avanzado). (Se explica más adelante) |
| − | Si se muestran los valores de | + | Si se muestran en negrita los valores de alerón, elevador, o cola, el sistema está detectando un comando en alguno de los ejes nombrados. |
| − | + | Para ajustar Gyro Gain y el Modo del giróscopo de cola, compruebe la barra Gyro. | |
| − | + | ==== SPECTRUM ANALYSER (ANALIZADOR VIBRACIONES) ==== | |
El analizador de espectro es una herramienta para medir la cantidad de vibraciones en su modelo. Es una herramienta de diagnóstico diseñada para determinar qué parte giratoria está causando un problema. Con esta información usted puede fácilmente identificar y solucionar los problemas con su modelo. | El analizador de espectro es una herramienta para medir la cantidad de vibraciones en su modelo. Es una herramienta de diagnóstico diseñada para determinar qué parte giratoria está causando un problema. Con esta información usted puede fácilmente identificar y solucionar los problemas con su modelo. | ||
| − | Para comprobar | + | Para comprobar el estado del modelo puede observar la barra "Vibrations" (Vibraciones). Esto indica la amplitud de la vibración general en el eje seleccionado. |
| − | Es posible medir las vibraciones en tres ejes | + | Es posible medir las vibraciones en tres ejes independientes:<br /> |
*''X - elevator axis (elevador)'' | *''X - elevator axis (elevador)'' | ||
| − | *''Y - aileron axis ( | + | *''Y - aileron axis (alerón)'' |
*''Z - rudder axis (cola)'' | *''Z - rudder axis (cola)'' | ||
| − | *''In-Flight - | + | *''In-Flight - Vibraciones en tiempo real'' |
| − | El gráfico muestra las frecuencias en | + | El gráfico muestra las frecuencias en tiempo real para el eje seleccionado. Esto le permite ver tanto la frecuencia como la magnitud de la vibración en el eje seleccionado. |
| − | Las vibraciones se transmiten a cada uno de los ejes | + | Las vibraciones se transmiten a cada uno de los ejes dependiendo de varios factores. La frecuencia y la magnitud dependen de la construcción del modelo. En general, las vibraciones son más altas en el eje Y (alerones), pero le recomendamos que revise todos los ejes cada vez que realice una comprobación. Las vibraciones no deben exceder de 50% en ningún caso, para cualquiera de los ejes. En el caso que las vibraciones estén a 90% o superior, el modelo tiene un problema que necesita ser corregido inmediatamente. En caso de que la magnitud sea superior al 90% en cualquiera de los ejes, |
| − | se recomienda | + | se recomienda arreglar el problema causante de las vibraciones antes de volar de nuevo el modelo. A pesar de que la unidad de Spirit es altamente resistente a las vibraciones, éstas podrían causar interacciones no deseadas con la unidad Spirit además de poder causar un problema mecánico en su modelo. Vibraciones tan altas pueden hacer que incluso que el fijatornillos no sea suficiente para sujetar algunas piezas o incluso puedan producirse roturas en piezas clave de su helicóptero. |
| − | Niveles de | + | Niveles de vibración:<br /> |
| − | *Vibraciones | + | *Vibraciones hasta 50% - niveles de vibración aceptables y normales |
*Vibraciones entre 50% y 90% - niveles elevados de vibraciones | *Vibraciones entre 50% y 90% - niveles elevados de vibraciones | ||
| − | *Vibraciones que excedan 90% - niveles de | + | *Vibraciones que excedan 90% - niveles de vibración extremas |
| − | + | Además de no superar un 50% a nivel general, cualquier frecuencia específica (pico) no debe exceder de 50%. Cualquier valor por encima de este nivel debe ser motivo de preocupación y requiere de una investigación. | |
| − | Para | + | Para comparar diferentes gráficos, puede utilizar el botón ''Freeze'' (congelar). Los valores en tiempo real se seguirán mostrando pero el instante capturado mediante el botón ''Freeze'' se guardará y se mostrará superpuesto. Este gráfico se puede borrar con el botón ''Clear''. |
| − | Es posible guardar las gráficas del analizador de espectro. | + | Es posible guardar las gráficas del analizador de espectro. Mediante el botón ''To image'', el gráfico actual se guardará como una imagen. |
| − | El analizador de | + | El analizador de vibraciones es capaz de detectar frecuencias de vibración de hasta 500 Hz (piezas girando a velocidades de hasta 30.000RPM). |
[[File:3_1fen.png|center|500px]] | [[File:3_1fen.png|center|500px]] | ||
| − | '''Procedimiento de | + | '''Procedimiento de medición.''' |
| − | #Retire | + | #Retire las palas principales y de cola del modelo. |
| − | #Coloque el modelo en una superficie adecuada | + | #Coloque el modelo en una superficie adecuada y mullida (por ejemplo una alfombra o hierba). |
| − | # | + | #Ajuste el paso de los rotores principal y de cola a aproximadamente 0 °. |
| − | # | + | #Ejecute el analizador de espectro (todos los servos se bloquearán). |
| − | # | + | #Haga girar el motor a la RPM de vuelo normal. |
| − | # | + | #Seleccione los distintos ejes X, Y y Z, guarde una imagen de cada uno. |
| − | #Verifique vibraciones en todos los ejes. | + | #Verifique las vibraciones en todos los ejes. |
#Pare el motor. | #Pare el motor. | ||
| − | ''' | + | '''Identificación de vibraciones''' |
| − | + | Mediante la velocidad de los picos más altos podrá identificar el componente o parte causante de las vibraciones. El rotor principal tiene la velocidad más baja y la velocidad del rotor de cola será de aproximadamente 4.5 veces mayor. En general, cuanto menor es el tamaño del modelo, mayor es la velocidad del rotor. | |
| − | Con el fin de averiguar qué parte del modelo está causando las vibraciones no deseadas, | + | Con el fin de averiguar qué parte del modelo está causando las vibraciones no deseadas, mueva el cursor sobre el pico sospechoso correspondiente, la velocidad de giro (RPM) se mostrará en pantalla. La velocidad del rotor principal está normalmente en el rango de 1500 a 3500 RPM. Por lo tanto, si la velocidad está dentro de este intervalo, es probable que exista un problema con el engranaje principal, eje principal, los |
| − | cojinetes del eje principal o cabeza | + | cojinetes del eje principal o la cabeza del rotor en sí. |
| − | La mayoría de las vibraciones excesivas suelen | + | La mayoría de las vibraciones excesivas suelen estar, aunque no siempre, relacionadas con la cola. Para comprobar si hay vibraciones procedentes de la cola, debe buscar un pico de frecuencia a aproximadamente 4.5 veces la frecuencia del rotor principal. |
| − | Una vez | + | Una vez identifique qué parte del helicóptero está causando las vibraciones no deseadas, puede poco a poco ir eliminando los componentes del conjunto sospechoso, repitiendo el proceso de medición hasta que la vibración desaparezca. Una vez que los niveles de vibración se hayan reducido a un nivel aceptable, habrá encontrado la parte defectuosa y podrá remplazarla. |
| − | + | La medición de vibraciones con las palas de cola montadas conlleva un gran riesgo, pudiendo observar además mayores niveles de vibración. | |
| − | {{Info|[[File:Info.png]] | + | {{Info|[[File:Info.png]] No debe nunca utilizarse un motor de gasolina sin carga! La medición de vibraciones no podrá entonces ser realizada sin palas de manera estática. |
}} | }} | ||
| − | ''' | + | '''Análisis de vibraciones en vuelo''' |
| − | Esta función le permite grabar el espectro de vibraciones | + | Esta función le permite grabar el espectro de vibraciones en cualquier momento del vuelo. Mediante el canal seleccionado se le puede indicar a la unidad cuándo el espectro debe ser guardado. Los datos pueden ser analizados más tarde en el software de configuración de Spirit mediante la opción ''In-Flight'' dentro de Spektrum Analizer en la pestaña Diagnostic. La gráfica de vibraciones guardada se almacenará hasta que la unidad se apague. El registro se sobre-escribirá cada vez que actúe sobre el canal elegido. |
| − | Para | + | Para medir vibraciones en vuelo asigne la función adecuada dentro del menú Channels dentro de la pestaña General. Asigne la función ''F: Spektrum Analysis'' con el eje que desea medir. A continuación, seleccione en el canal de su receptor que activará la función. |
| − | Tan pronto como el valor sea igual a 1 se | + | Tan pronto como el valor sea igual a 1 se guardará el espectro de vibraciones. El registro se guarda exactamente en el momento en que la función cambia su estado de 0 a 1. |
| − | Durante el vuelo | + | Durante el vuelo tan solo debe activar el cambio de estado desde su emisora (por ejemplo mediante un interruptor de 2 estados). Tras aterrizar, puede conectar la unidad con el software y abrir el analizador de vibraciones (seleccione el eje ''In-Flight'' para mostrar el espectro). |
| − | + | ==== BEC TESTER (TEST DE BEC) ==== | |
| − | + | Este test se utiliza para determinar si la fuente de alimentación de su unidad, el receptor y los servos es suficiente. El propósito es lograr el mayor pico de corriente y comprobar que la tensión de alimentación no cae por debajo de un nivel seguro. | |
[[File:Becen.png|center|400px]] | [[File:Becen.png|center|400px]] | ||
| − | Haga clic en el botón ''Start'' (Inicio) para iniciar la prueba. Después de 20 segundos | + | Haga clic en el botón ''Start'' (Inicio) para iniciar la prueba. Después de 20 segundos deberá haberse terminado. |
| + | Si durante el test observa cualquier problema, su fuente de alimentación es insuficiente y no se debe utilizar. En este caso, debe buscar una fuente de alimentación de mayor potencia. | ||
| − | + | ==== LOG VIEWER (REGISTRO DE VUELO) ==== | |
| − | El registro se usa para grabar eventos durante el | + | El registro de vuelo se usa para grabar eventos durante el mismo. Si se produce un problema y la razón no es evidente, puede comprobar el log para ayudarle a identificar el problema. |
| − | Funciona de tal manera que registra | + | Funciona de tal manera que registra todos los eventos desde el momento en que la unidad se enciende. Si se produce un evento se puede ver esto en el registro, las entradas del log aparecen en intervalos fijos de 10 segundos. Al hacer clic en el botón ''Open log''podrá acceder al log de vuelo actual que contiene todos los eventos desde el último vuelo. |
| + | Una vez el sistema se apague, el registro se reinicia. | ||
| − | En el caso de un problema importante | + | En el caso de que ocurra un problema importante durante el vuelo [[File:Tr.png|20px]] el log se almacenará entonces permanentemente en la memoria de la unidad, quedando almacenado hasta que se abra el registro. |
| − | pierde | + | Si existe un registro de error guardado en la memoria, el usuario será advertido con el mensaje “Log from previous flight is available!” (Registro de un vuelo anterior disponible!) y el registro de vuelo en el momento de sucederse el error ser mostrará al abrirse. Por ejemplo, si se pierde la señal de receptor o si existe un fallo en la alimentación podrá encontrar esta información en el registro. El registro del primer vuelo donde se produjo un problema estará siempre almacenado. Si no se abre, nunca será sobre-escrito por un error posterior. Si esto sucede, el usuario será también notificado mediante un movimiento de plato cíclico diferente durante el proceso de inicialización. |
El registro puede contener los siguientes eventos: | El registro puede contener los siguientes eventos: | ||
| Line 298: | Line 294: | ||
:: <div style="font-size:small">El modelo se encuentra en buenas condiciones. La unidad no reconoció ningún problema.</div> | :: <div style="font-size:small">El modelo se encuentra en buenas condiciones. La unidad no reconoció ningún problema.</div> | ||
| − | [[File:I.png|20px]] Calibration Finished ( | + | [[File:I.png|20px]] Calibration Finished (Calibración terminada): |
| − | :: <div style="font-size:small">La | + | :: <div style="font-size:small">La calibración del sensor se ha realizado correctamente.</div> |
| − | [[File:I.png|20px]] Governor was Engaged ( | + | [[File:I.png|20px]] Governor was Engaged (Governor activo): |
| − | :: <div style="font-size:small"> | + | :: <div style="font-size:small">El Governor logro alcanzar las RPM de consigna y esta activo desde este momento.</div> |
| − | [[File:Zv.png|20px]] Cyclic Ring Activated ( | + | [[File:Zv.png|20px]] Cyclic Ring Activated (Anillo de Cíclico Activo): |
| − | :: <div style="font-size:small"> | + | :: <div style="font-size:small">El Cíclico ha alcanzado su máximo ángulo de inclinación. Esto indica que el modelo fue incapaz de aplicar la corrección deseada. En la mayoría de los casos no es relevante. Es posible que el valor del parámetro de cyclic ring sea demasiado bajo y el modelo no pueda girar tan rápido como se pretende en los ejes de alerones/elevador. De manera alternativa, puede configurarse un valor más alto para los modos de vuelo de alta velocidad de giro. Es posible también que en vuelo a alta velocidad de translación se produzca un movimiento rápido de elevador. |
| + | Se recomienda establecer este parámetro tan alto como sea mecánicamente posible.</div> | ||
| − | [[File:Zv.png|20px]] Rudder Limit Reached (Limite de | + | [[File:Zv.png|20px]] Rudder Limit Reached (Limite de Cola Alcanzado): |
| − | :: <div style="font-size:small">El servo | + | :: <div style="font-size:small">El servo de cola alcanzó su límite configurado. Si este evento se produce antes o después de un vuelo no existe ningún problema. Si ve este mensaje durante el vuelo quiere decir que la cola no ha funcionado correctamente. En la mayoría de los casos será además visible durante el vuelo en forma de mala respuesta o pérdida temporal de la cola. Si el modelo se ha configurado correctamente, entonces podría ser debido a una baja eficiencia del rotor de cola, causada por ejemplo por la utilización de unas palas de cola muy cortas o bajas RPM. También existe la posibilidad de un problema mecánico o relacionado con unos límites escasos en el recorrido del paso del rotor de cola.</div> |
| − | [[File:Zv.png|20px]] RPM Sensor data are too noisy (Datos del sensor RPM | + | [[File:Zv.png|20px]] RPM Sensor data are too noisy (Datos del sensor RPM demasiado ruidosos): |
| − | :: <div style="font-size:small"> | + | :: <div style="font-size:small">La lectura de RPM es muy inestable y oscila más de +/- 100 RPM. Los datos del sensor son inservibles para el Governor. Utilice blindaje adicional y monte un anillo de ferrita. Aumente el valor del parámetro RPM Sensor filter en el menú Expert settings dentro de la pestaña Advanced.</div> |
| − | [[File:Zv.png|20px]] Received Frame was Corrupted (Trama | + | [[File:Zv.png|20px]] Received Frame was Corrupted (Trama de receptor corrupta): |
| − | :: <div style="font-size:small">Trama recibida es inutilizable y se ignorará. En las mayoría de los casos no presenta ningún problema. Si el evento se produce a menudo, entonces la conexión entre el receptor puede estar | + | :: <div style="font-size:small">Trama recibida del receptor es inutilizable y se ignorará. En las mayoría de los casos no presenta ningún tipo de problema. Si el evento se produce a menudo, entonces la conexión entre el receptor puede estar mal o existe un exceso de ruido electromagnético. Verifique la calidad del enlace de radio y compruebe el cable entre la unidad y el receptor.</div> |
| − | [[File:Zv.png|20px]] GeoLink function is imprecise: | + | [[File:Zv.png|20px]] GeoLink function is imprecise (Funcionamiento impreciso del GeoLink): |
| − | :: <div style="font-size:small">GeoLink | + | :: <div style="font-size:small">La función GeoLink no está funcionando correctamente. La brújula (magnetómetro) de su GeoLink puede requerir una nueva calibración. Asegúrese de que no existen motores, servos o imanes cerca del módulo GeoLink.</div> |
| − | [[File:Zv.png|20px]] GeoLink Data were Corrupted: | + | [[File:Zv.png|20px]] GeoLink Data were Corrupted (Datos GeoLink corruptos): |
| − | :: <div style="font-size:small">GeoLink | + | :: <div style="font-size:small">La calidad de la comunicación con el GeoLink no es buena. Compruebe el cable entre el GeoLink y la unidad Spirit. Asegúrese de que no existen descargas electrostáticas que provengan the la correa de transmisión. Utilice el cable más corto que pueda.</div> |
| − | [[File:Tr.png|20px]] RPM Sensor data are lost ( | + | [[File:Tr.png|20px]] RPM Sensor data are lost (Datos del sensor RPM perdidos): |
| − | :: <div style="font-size:small">La lectura de datos del sensor ha fallado - | + | :: <div style="font-size:small">La lectura de datos del sensor ha fallado - lo más probable es un mal funcionamiento del sensor de RPM. El sensor no envía datos durante 2 segundos o más. Asegúrese de que el cableado del sensor es correcto y de que el motor gire cuando active el motor.</div> |
| − | [[File:Tr.png|20px]] Receiver Signal Lost (Señal Receptor Perdida): | + | [[File:Tr.png|20px]] Receiver Signal Lost (Señal de Receptor Perdida): |
| − | :: <div style="font-size:small"> | + | :: <div style="font-size:small">La señal se perdió repentinamente. Este problema no debería ocurrir en ningún momento y debe ser resuelto antes de próximo vuelo. Podría haber un problema con el receptor y/o antenas de comunicación. Podría ser un cable del receptor defectuoso o una mala conexión entre la unidad y el receptor. En algunos casos puede ocurrir una pérdida de la señal debido a una descarga electrostática causada por la acumulación de electricidad estática, esto ocurre generalmente en helicópteros con transmisión por correa.</div> |
| − | [[File:Tr.png|20px]] Main Loop Hang Occurred ( | + | [[File:Tr.png|20px]] Main Loop Hang Occurred (Cuelgue del Bucle Principal de Control): |
| − | :: <div style="font-size:small">El bucle principal se retrasó. Esto puede suceder cuando el cableado no es | + | :: <div style="font-size:small">El bucle de control principal se retrasó. Esto puede suceder cuando el cableado no es correcto o existe una interferencia de ruido eléctrico con la unidad, por ejemplo, de un BEC. Si cuando ocurre se está utilizando el software de configuración, podría significar que el enlace con la unidad Spirit es más lento de lo que debería ser.</div> |
| − | [[File:Tr.png|20px]] Power Voltage is low ( | + | [[File:Tr.png|20px]] Power Voltage is low (Tensión de Alimentación Baja): |
| − | :: <div style="font-size:small">Tensión de alimentación | + | :: <div style="font-size:small">Tensión de alimentación inferior a 2.9V. Esto significa que debe utilizar un BEC de mayor potencia. En casos raros podría ser debido a conexiones defectuosas en los cables.</div> |
| − | [[File:Tr.png|20px]] Vibration Level is very high (Nivel | + | [[File:Tr.png|20px]] Vibration Level is very high (Nivel de Vibración muy Alto): |
| − | :: <div style="font-size:small"> | + | :: <div style="font-size:small">El nivel de vibración ha alcanzado un nivel que no es normal y puede afectar a la integridad del helicóptero. Durante las maniobras 3D más duras, el evento puede ocurrir con más frecuencia.</div> |
| − | [[File:Tr.png|20px]] GeoLink connection is broken: | + | [[File:Tr.png|20px]] GeoLink connection is broken (Conexión con el GeoLink Rota): |
| − | :: <div style="font-size:small">GeoLink | + | :: <div style="font-size:small">La comunicación con el módulo GeoLink se ha parado repentinamente. Todas las funciones relacionadas con el GeoLink dejan de funcionar. Verifique el cable entre el GeoLink y la unidad Spirit. Asegúrese de que el LED del GeoLink no parpadee tras el aterrizaje.</div> |
| − | Todos los registros | + | Todos los registros se guardan como archivos PDF en el directorio Documentos. |
| − | === | + | ==== REALTIME LOGGING ==== |
| − | Esta | + | Spirit GT and Spirit GTR units feature '''Advanced Flight Logging''' capability. It is possible to record all variables and store hundreds of logs in embedded memory, view and share all data in a great detail. |
| + | |||
| + | See page [[RealTime_Logging|RealTime Logging]] for more information. | ||
| + | |||
| + | === SERVOS === | ||
| + | |||
| + | Esta pestaña se utiliza para la configuración de los servos, asegúrese de utilizar las frecuencias de servo correctas así como las direcciones de funcionamiento. | ||
[[File:4en.png|center|500px]] | [[File:4en.png|center|500px]] | ||
'''Tipo'''<br /> | '''Tipo'''<br /> | ||
| − | En esta sección, establezca los valores de pulso neutro y frecuencia de acuerdo a | + | En esta sección, establezca los valores de pulso neutro y frecuencia de acuerdo a las especificaciones del fabricante de sus servos. |
| − | Para servos analógicos la frecuencia es por lo general | + | Para servos analógicos la frecuencia es por lo general como máximo de 60 Hz. |
'''Subtrim (tuning)'''<br /> | '''Subtrim (tuning)'''<br /> | ||
| − | Idealmente, sin la cabeza del rotor | + | Idealmente, sin la cabeza del rotor instalada, utilice un nivelador de plato para alinear tanto el plato como los brazos de los servos de manera que ambos permanezcan perpendiculares al eje principal. |
| − | + | Cualquier tipo de ajuste debe realizarse con el Sub Trim (tuning). Se pondrá la unidad Spirit FBL en un modo especial en el que la posición del paso colectivo será neutra, con los servos centrados. Además, se desactivará la estabilización. | |
| − | principal | + | Puede ajustar los servos fácilmente en este momento. Al finalizar el proceso, el plato cíclico debe permanecer perfectamente perpendicular al eje principal, estando el paso colectivo a 0 ° (mida el ángulo en las palas mediante un medidor de paso). |
| − | En la mayoría de los casos, también es necesario | + | En la mayoría de los casos, también es necesario que los brazos se encuentren en este punto perpendiculares al eje principal. |
| − | Todos los servos | + | Todos los servos, CH1, CH2, CH3 y CH4, se ajustan mediante los controles individuales. CH1 y CH3 son los servos de alerón. CH2 controla el elevador y CH4 controla la cola. |
| − | También es necesario | + | También es necesario realizar un ajuste de subtrim en la cola, de manera que el brazo del servo quede perpendicular al re-envío y que el paso de cola quede a 0°. |
| − | Este ajuste afectará | + | Este ajuste afectará a la calidad de las paradas de cola. |
| − | Una vez configurado, | + | Una vez configurado, desactive la casilla ''Subtrim (tuning)'' para desactivar este modo especial. |
| − | {{Info|[[File:Info.png]] Después de salir del modo especial, la estabilización y | + | {{Info|[[File:Info.png]] Después de salir del modo especial, la estabilización y la cola funcionarán de nuevo. Asegúrese de que su canal de paso colectivo está configurado correctamente en su emisora. Debe ver valores de -100% a 100% en la pestaña de diagnóstico. Verifique que 0% en la pestaña de diagnóstico corresponden con la posición media de su stick colectivo/motor (utilizando una curva de paso lineal -100% + 100%). |
}} | }} | ||
<p></p> | <p></p> | ||
| − | {{Info|[[File:Info.png]] '''Micro | + | {{Info|[[File:Info.png]] '''Micro helicópteros y µSpirit:''' Cuando el rotor de cola cuente con su propio motor, el rendimiento del variador de cola se verá incrementado si utiliza la configuración ''Low RPM''. Esto se puede configurar en ''Subtrim (CH4) - Low RPM'' - el valor afecta al rendimiento en el despegue y ayuda a obtener un funcionamiento simétrico en ambos sentidos de giro. }} |
| − | '''Servo reverse'''<br /> | + | '''Servo reverse (Inversión servos)'''<br />Este menú le permite elegir qué servos deben tener su dirección de movimiento invertido. Movimientos en paso colectivo deben mover los tres servos en la misma dirección. Tras realizar los ajustes pertinentes, el modelo debe reaccionar correctamente al movimiento de los sticks. |
| − | '''Este parametro es | + | '''Este parametro es de gran importancia!''' |
| − | '''Servo travel correction ( | + | '''Servo travel correction (corrección recorridos servo)'''<br />Aquí, usted es capaz de modificar el recorrido para cada servo individualmente. Algunos servos no son muy precisos en cuanto al recorrido en sus límites, esta imprecisión pueden tener un impacto negativo en las características de vuelo. Una vez en esta sección del software, la unidad cambia a un modo especial para hacer estas correcciones. |
| − | + | Al terminar el paso anterior, ''Subtrim (tuning)'', el plato cíclico se ajustó a cero (0° de paso en las palas del rotor principal). | |
| − | + | El procedimiento es tal que debe usar un nivelador plato para determinar si hay alguna desviación en cualquiera de los servos en los puntos mínimo y máximo de paso colectivo. Existen ajustes separados para las posiciones mínima y máxima, - por ello existen 6 ajustes separados. Si el recorrido en alguno de los servos es menor del necesario, aumente el valor. Por el contrario, si es mayor, disminúyalo. Para activar los ajustes del segundo grupo, mueva el paso colectivo en dirección opuesta. | |
| − | Esta corrección | + | Esta corrección es útil también si existe una geometría asimétrica en el helicóptero causando problemas tales como la incapacidad de lograr los mismos valores de paso positivos y que negativos. En este caso, es necesario modificar los ajustes positivos o negativos para los tres servos. |
| + | Si no está seguro acerca de la configuración, es mejor dejar los ajustes en su posición central. (posición 0) | ||
[[File:3ken.png|center|500px]] | [[File:3ken.png|center|500px]] | ||
| − | === LIMITS | + | === LIMITS (LIMITES) === |
| − | Esta | + | Esta pestaña controla los límites y recorrido de los servos. |
[[File:5en.png|center|500px]] | [[File:5en.png|center|500px]] | ||
| − | '''Cyclic Ring (tuning) (Anillo Ciclico)'''<br /> | + | '''Cyclic Ring (tuning) (Anillo de Ciclico)'''<br />Este parámetro ajusta el anillo cíclico electrónico, que permite alcanzar los mayores rangos de cíclico sin llegar a forzar la mecánica (brazos de los servos, varillas y rótulas). |
| − | {{Info|[[File:Info.png]] | + | {{Info|[[File:Info.png]] Estos ajustes deben hacerse con mucho cuidado para evitar daños en el modelo o sus componentes electrónicos asociados. Nunca exceda los ángulos recomendados por el fabricante del modelo, si lo hace puede llegar a impactar con su pala en el tubo de cola. |
}} | }} | ||
| − | + | En primer lugar, establezca su ''Recorrido de paso'' deseado, por ejemplo, +/-12°. Se recomienda utilizar una curva de paso lineal -100% a 100% en la emisora. | |
| − | + | Ahora es el momento de ajustar los límites de paso cíclico de ''Alerón/Elevador''.<br /> | |
| − | + | Trate de ajustar la mayor deflexión posible. Normalmente los límites en el paso cíclico serán igual o inferiores al paso colectivo. | |
| − | + | Este parámetro no afecta directamente a la velocidad de rotación, pero si es demasiado bajo, el modelo puede presentar movimientos de giro en elevador y alerón poco consistentes. | |
| − | + | Este ajuste se debe hacer con 0 ° de paso colectivo. Después mueva con cuidado el plato en todas las direcciones para garantizar que no se llegan a los límites mecánicos. Realice esta comprobación tanto con paso colectivo máximo como con paso mínimo. | |
| − | + | ||
| − | + | ||
| − | + | Si se aumenta el rango de paso colectivo, se debe comprobar de nuevo este parámetro y, en algunos casos, ajustarlo para asegurar que no se fuerce ninguna pieza en sus nuevos máximos y mínimo de paso colectivo. | |
| − | + | Si el rango del anillo cíclico es insuficiente, es posible que se levante el morro de su helicóptero en vuelo nivelado a alta velocidad (incluso si la compensación pitch-up está en su valor máximo). Esto se debe a que el modelo no podrá compensar suficientemente por el bajo rango configurado. | |
| − | + | ||
| − | + | ||
| − | '''Rudder end-points (tuning) ( | + | '''Rudder end-points (tuning) (Recorridos de cola)'''<br /> |
| − | '''Límite | + | '''Límite Izquierdo / Derecho''' - Ajusta la deflexión mínima y máxima de las palas del rotor de cola. |
| − | + | Recomendamos que ambos valores se ajusten a los máximos mecánicos permitidos por el fabricante del helicóptero. Si no es así, el helicóptero puede que no sea capaz de controlar la cola durante las maniobras más exigentes, pudiéndola perder si esto ocurre. | |
| + | No exceda los valores máximos de su modelo. | ||
| − | {{Info|[[File:Info.png]] '''Micro | + | {{Info|[[File:Info.png]] '''Micro helicópteros y µSpirit:''' Cuando se utiliza un motor separado para la cola, el variador de cola debe conectarse al canal CH4. Los límites de cola se utilizarán para adecuarse a los límites del variador de cola 0% (motor parado) a 100% (motor a pleno régimen). Se recomienda ajustar en un principio Stop limit a 126 y Full limit a 150. }} |
| − | === SENSOR | + | === SENSOR === |
| − | Esta pestaña es la parte | + | Esta pestaña es la parte menos importante de los ajustes que se deben configurar. |
[[File:6en.png|center|500px]] | [[File:6en.png|center|500px]] | ||
| − | '''Sensitivity (Sensibilidad)'''<br />El | + | '''Sensitivity (Sensibilidad)'''<br />El ajuste giratorio ajusta la sensibilidad del giróscopo para los ejes de alerón, elevador y cola. |
| − | '''Cyclic gain ( | + | '''Cyclic gain (Ganancia de cíclico)''' – Cuanto más alto sea el valor, mayor será la precisión del bucle de control. El valor predeterminado se configura a 55% de ganancia, para la mayoría de los modelos se sugiere un valor óptimo de alrededor del 60%. |
| − | '''Rudder Common Gain''' – 1.00x | + | '''Rudder Common Gain (Ganancia principal de Cola)''' – 1.00x significa que no hay multiplicación. Este es el valor recomendado para helicópteros de clase 550 y más pequeños. Para helicópteros más grandes a menudo es más alto. 1.3x podría estar bien. La ganancia de giróscopo en su emisora debe ajustarse a un valor aproximado de 50% para el primer vuelo. |
| − | '''Rudder Gain''' – | + | '''Rudder Gain (Ganancia Cola)''' – Este parámetro sólo se activa en caso de no tener asignado un canal de ganancia Gyro. Sustituye a la función de ganancia Gyro de su emisora, por lo que puede establecer directamente el valor en el software. |
| − | + | Puede ajustar la ganancia de cola en el software o en su emisora de la siguiente manera: | |
| − | *Head-Lock mode(modo bloqueo cola): 1% | + | *Head-Lock mode(modo bloqueo cola): 1% a 100% |
| − | *Normal(Rate) | + | *Normal(Rate) (sin bloqueo cola o función especial): -100% a 0% |
| − | + | Se puede elegir una ganancia del giróscopo negativa para activar el modo rescate o estabilización - compruebe la pestaña Stabi. | |
| − | {{Info|[[File:Info.png]] | + | {{Info|[[File:Info.png]] Algunas emisoras tienen un rango de giróscopo de 0 a 100% donde el 50% es el medio - cero ganancia (por ejemplo, Spektrum DX6i). Otras emisoras usan un rango de -100% a 100%, donde 0% es el medio.}} |
| − | '''Rotation speed'''<br /> | + | '''Rotation speed (Velocidad de rotación)'''<br />El valor por defecto es 8 y es adecuado para principiantes, cuanto mayor sea el valor, la velocidad de rotación de cíclico será mayor. Este factor depende también del ratio mecánico del varillaje o del D/R (Dual Rate) programado en la emisora, así como de los límites de Alerón/Elevador. |
| − | + | Asegúrese de que el valor no es demasiado alto ya que puede producir movimientos no deseados o imprecisos. | |
''Valor predeterminado - 8'' | ''Valor predeterminado - 8'' | ||
| − | Recomendamos ajustar la velocidad de rotación | + | Recomendamos ajustar la velocidad de rotación de cíclico en el rango de 8 a 11. Recuerde que las cabezas de rotor DFC tienden a rotar más rápido, por lo que es mejor comenzar con un valor inferior para helicópteros equipados con este tipo de cabeza. |
| − | + | Para la velocidad de rotación de cola, el rango preferido por los pilotos suele ser 9 - 11. | |
| − | === STABI | + | === STABI (ESTABILIZACION) === |
| − | La unidad | + | La unidad Spirit le ofrece la opción de los modos de estabilización y rescate. La función de estabilización, una vez activada, recuperará el modelo a una posición horizontal sin necesitar nada más por parte del piloto, pudiéndose utilizar para recuperar la posición cuando intente nuevas maniobras, pudiendo ayudar durante el proceso de aprendizaje. |
| − | La función de estabilización, una vez | + | |
[[File:7en.png|center|500px]] | [[File:7en.png|center|500px]] | ||
| − | El modo de | + | El modo de Rescate complementa la operación normal de la unidad Spirit. Una vez activado, el modelo se recuperará a una posición horizontal y aumentará el colectivo según la configuración. Esta función se puede utilizar en cualquier momento cuando el piloto pierde la orientación o el control del modelo. |
| − | + | Tan pronto como el piloto desactiva el modo Rescate el control se recupera inmediatamente. | |
| − | + | El modo de Estabilización mantiene la horizontalidad del modelo una vez se sueltan los sticks, haciendo del vuelo una tarea fácil. Diferentes modos de estabilización se encuentran disponibles. El manejo del paso colectivo no se ve afectado en el modo de Estabilización. | |
| − | + | El proceso de ajuste de los modos Rescate o Estabilización se describe en la página [[Stabi mode|Modo Stabi]]. | |
| − | + | Existe un asistente de ajuste para el Rescate directamente en los ajustes Spirit. Vaya a la pestaña Stabi si la función se encuentra desactivada. | |
| − | + | Puede activar la''Función'' seleccionada por dos métodos distintos: | |
| − | * ''' | + | * '''Ganancia de Gyro Negativa''' |
| − | * ''' | + | * '''Canal Dedicado''' |
| − | + | El método de Ganancia de Gyro negativa es el adecuado para emisoras con un limitado número de canales (6 - 7). | |
| − | + | Si dispone de canales libres sin usar, el método de Canal Dedicado es mejor y más fácil. | |
| − | El modo seleccionado actualmente se muestra en la pestaña de | + | El modo seleccionado actualmente se muestra en la pestaña de Diagnóstico. |
| − | ''' | + | '''Función'''<br />Aquí es donde se selecciona el modo que activa mediante ganancias de giróscopo negativas. |
| − | *[[Normal Mode/es|Disabled (Desactivado)]] - Normal (Rate) gyro | + | *[[Normal Mode/es|Disabled (Desactivado)]] - Normal (Rate) modo normal gyro. |
| − | *[[Rescue (Normal)/es|Rescue (Normal)]] - | + | *[[Rescue (Normal)/es|Rescue (Normal)]] - Recovers the model to an upright horizontal position – skids always to the ground. This recovery mode is great for beginners. |
| − | *[[Rescue (Acro)/es|Rescue (Acro)]] - | + | *[[Rescue (Acro)/es|Rescue (Acro)]] - Recovers the model to a horizontal position, inverted or upright, whichever is closer at the time of activation. For intermediatte and advanced pilots that are flying acrobatic maneuvers. |
| − | *[[Stabilization (Normal)/es|Stabilization (Normal)]] - | + | *[[Stabilization (Normal)/es|Stabilization (Normal)]] - Modo de estabilización - patines siempre al suelo. Este modo es bueno para aprender los conceptos básicos tales como estacionario y transiciones lentas. El modelo es siempre llevado a posición horizontal. |
| − | *[[Stabilization (Acro)/es|Stabilization (Acro)]] - | + | *[[Stabilization (Acro)/es|Stabilization (Acro)]] - Modo de estabilización - posición positiva o invertida, la más cercana en el momento de la activación. Este modo se utiliza para el aprendizaje de los conceptos básicos de maniobras acrobáticas. Si los sticks se dejan en el centro, el modelo tiene tendencia a volver a la posición horizontal. |
| − | *[[Stabilization (Scale)/es|Stabilization (Scale)]] - | + | *[[Stabilization (Scale)/es|Stabilization (Scale)]] - Modo de estabilización - patines siempre al suelo. Este modo se utiliza para vuelo de maquetas. Modo de Gyro Normal (Rate). |
| − | *[[Coaxial/es|Coaxial]] - | + | *[[Coaxial/es|Coaxial]] - Modo de estabilización - en posición positiva o invertida, la más cercana en el momento de la activación. El comportamiento de la cola es muy similar a un helicópteros coaxial. Genial para hacer unas prácticas sin agobiarse. |
| + | *[[Rescue (Automatic)|Rescue (Automatic)]] - Recovers the model to an upright horizontal position – skids always to the ground – whenever is model under defined Hard Deck altitude. Rescue must be activated when flying but upon reaching low altitude it will take control of the model automatically. During lift off and landing it must be turned off. This recovery mode is great for beginners. | ||
| − | {{Quote| | + | |
| + | {{Quote|Las funciones Rescate, Estabilización y GeoLink pueden verse afectadas por las condiciones del modelo. Antes de probarlas en vuelo lea por favor [[Imprecise_Rescue|esta página]]. | ||
}} | }} | ||
<p></p> | <p></p> | ||
| − | {{Quote|''' | + | {{Quote|'''El modo de rescate es muy exigente con el BEC. Asegúrese de que su BEC es suficiente para manejar este tipo de picos de corriente de alimentación de electrónica. En caso de que no sea suficiente, el modelo podría estrellarse! Nunca exceda los ángulos de paso recomendados por el fabricante del modelo, de lo contrario los mecanismos pueden sufrir daños durante el vuelo!'''}} |
| − | '''Rescue collective pitch (Rescate | + | '''Rescue collective pitch (Paso Colectivo en Rescate)'''<br />Esto determina la rapidez con la que el modelo se recuperará a una posición horizontal. |
| − | Es muy importante comprobar si el modo de | + | 100% significa el valor máximo de paso, el que se configuró en la pestaña Servos. |
| − | mientras que el helicóptero está en el suelo. | + | Es muy importante comprobar si el modo de Rescate funciona correctamente antes del primer vuelo (en la mesa sin motor / rotores en marcha). |
| + | El paso colectivo debe ser siempre positivo con el Rescate activado - mientras que el helicóptero está en el suelo. | ||
| − | '''Sticks priority (Prioridad sticks)'''<br />Especifica la cantidad de control mientras que el modo configurado se activa. Cuanto mayor sea el valor, más | + | '''Sticks priority (Prioridad de los sticks)'''<br />Especifica la cantidad de control mientras que el modo configurado se activa. |
| + | Cuanto mayor sea el valor, más va a reaccionar el modelo a los movimientos de los sticks. | ||
| − | '''Direction control rate ( | + | '''Direction control rate (Velocidad de Control Direccional)'''<br />Especifica la velocidad de control direccional para el modo de Estabilización. |
| − | + | Valores bajos son adecuadas para principiantes, para obtener un comportamiento similar al de un helicóptero coaxial. Valores más altos son más apropiados para el vuelo de maquetas. | |
| − | '''Acro Delay ( | + | '''Acro Delay (Retardo Acro)'''<br />Especifica el periodo de tiempo para el Rescate (Normal), cuando el modelo se recupera desde vuelo invertido. Hasta que el periodo de tiempo es alcanzado, el rescate tiene el mismo comportamiento que el rescate (Acro). De esta manera se consigue un ascenso hasta una altura segura de manera más rápida. |
| − | tiene el mismo comportamiento que el rescate (Acro). De esta manera | + | |
| − | '''Rescue Duration'''<br /> | + | '''Rescue Duration (Duración del Rescate)'''<br />Una vez el tiempo elegido pasa, el modo Rescate terminará y el modelo se quedará en vuelo estacionario. Para ello se utiliza el valor Hovering Collective Pitch. Este tiempo se cuenta desde que se activó el modo Rescate. El parámetro está disponible para ambos Rescue (Normal) y Rescue (Acro). La transición entre Rescate y estacionario se realiza de manera suave, y se realizará únicamente si el modo Rescate se encuentra todavía activo. |
| + | El control del paso colectivo vuelve al piloto tan pronto como se ejecuta un movimiento del stick de paso. | ||
| − | '''Hovering Collective Pitch'''<br /> | + | '''Hovering Collective Pitch (Paso Colectivo Estacionario)'''<br />Si el parámetro Rescue Duration se encuentra activo, tras él el modelo se quedará en vuelo estacionario. Para hacer que el modelo se mantenga en estacionario es necesario ajustar este parámetro. Si se ajusta muy bajo, el modelo descenderá en vez de mantenerse. Si se ajusta muy algo, el modelo ascenderá en vez de mantenerse. Se recomienda un valor alrededor del 40%. |
| − | === ADVANCED | + | === ADVANCED (AVANZADO) === |
| − | Esta | + | Esta pestaña contiene configuraciones más avanzadas de la unidad Spirit. Se recomienda comprender completamente estos parámetros antes de ajustarlos. <u>Se utiliza principalmente para ajustar la geometría</u>. Otros parámetros, sin embargo, permiten ajustar el sistema a las preferencias del piloto. |
[[File:8en.png|center|500px]] | [[File:8en.png|center|500px]] | ||
| − | '''Geometry 6° (tuning) (Geometria)'''<br />Para un correcto funcionamiento de la unidad | + | '''Geometry 6° (tuning) (Geometria 6°)'''<br />Para un correcto funcionamiento de la unidad Spirit, es necesario configurar adecuadamente este parámetro. En este punto, la unidad se cambia a un modo especial para el ajuste de 6° de paso cíclico de las palas principales. Es necesario ajustar el valor de manera que el ángulo de las palas llegue a los 6° en el eje de alerón. Es necesario colocar el rotor con las palas alineadas con el tubo de cola del modelo. Al aumentar el valor se aumentará el ángulo; al reducirlo se disminuirá. Un ajuste óptimo se conseguirá cuando el valor se sitúe en el rango 90 - 160. Si no está en este rango, se recomienda ajustar la distancia la bola del brazo del servo o realizar otros ajustes mecánicos. |
| − | a un modo especial para | + | |
| − | + | ||
| − | 160. Si no está en este rango, se recomienda ajustar la distancia | + | |
| − | '''Collective Direction'''<br />Parámetro | + | '''Collective Direction (Dirección de Paso Colectivo)'''<br />Parámetro que ajustar la dirección del paso colectivo. |
| + | En el caso de controlar el paso de la pala desde el borde de salida o si existen brazos de mezcla en el rotor, marque la opción ''Reversed option''. En la mayoría de los casos el parámetro deberá dejarse sin marcar. | ||
| − | {{Info|[[File:Info.png]] | + | {{Info|[[File:Info.png]] Configurar este parámetro de manera correcta es sumamente importante, de lo contrario el paso colectivo funcionará al revés. |
}} | }} | ||
| − | '''Elevator filter (Filtro | + | '''Elevator filter (Filtro de Elevador)'''<br />Este parámetro compensa el rebote de elevador durante maniobras agresivas. Cuanto mayor sea el valor, más compensación se aplica. |
| + | Si este valor es demasiado alto puede llevar a una sensación suave "suelta" del elevador. Se recomienda utilizar el valor predeterminado de 1 para empezar. | ||
| − | '''Cyclic feed forward'''<br /> | + | '''Cyclic feed forward (Pre-alimentación de Cíclico)'''<br /> |
| − | Este parámetro se utiliza para establecer la | + | Este parámetro se utiliza para establecer la sensación de reactividad entre sus sticks y su modelo. Cuanto más alto sea el valor, más agresivo sentirá el modelo y más rápido reaccionará a los movimientos del stick. |
| − | agresivo el modelo | + | Si ajusta este valor demasiado alto puede causar un rebote en el eje de elevador. |
| − | rebote elevador. Si el modelo se siente desconectado y hay un desfase entre las entradas | + | Si el modelo se siente como desconectado y hay un desfase entre las entradas del stick y la reacción del modelo, pruebe a aumentar este valor. |
| − | '''Rudder delay ( | + | '''Rudder delay (Retardo de Cola)'''<br />Este parámetro suaviza los movimientos de cola. También ayuda a estabilizar la cola - es una especie de amortiguación electrónica. Cuanto más rápido sea el servo, más bajo tendrá que ajustarse el retardo. Para servos analógicos se recomienda ajustar este valor en torno a 20-25. Para servos digitales lentos ajuste entre 10 - 15. Para servos muy rápidos (~0.04s/60°) el valor es 5. En el caso de un servo brushless se recomienda establecer un valor de 0-2. |
| − | + | Si el valor es demasiado alto, la cola podría comenzar a oscilar o observarse paradas de cola lentas e imprecisas. | |
| − | '''Rudder dynamic ( | + | '''Rudder dynamic (Dinámica de cola)'''<br />Si la cola no se detiene correctamente, por ejemplo, para más tarde de lo que debiera, este parámetro ayuda a corregirlo. |
6 - es el valor predeterminado. | 6 - es el valor predeterminado. | ||
| − | Cuanto mayor sea el valor, más agresivo es el comportamiento de la cola. Si la cola | + | Cuanto mayor sea el valor, más agresivo es el comportamiento de la cola. |
| + | Si la cola para más tarde de lo que debiera, el valor es demasiado alto. | ||
| + | Este parámetro también afecta a la velocidad de respuesta del movimiento del stick; un valor más alto significa una respuesta más rápida. | ||
| + | Si no puede llegar a obtener una parada similar en ambos lados, asegúrese de que el centrado del mecanismo de cola es correcto en 0°. De manera alternativa, puede bajar el límite de cola para ese lado. | ||
| − | '''Rudder – Revomix'''<br />Revomix ( | + | '''Rudder – Revomix'''<br />Revomix (pre-compensación de cola) añade cola por defecto ante los cambios del paso colectivo, cuando la cola necesita sujetar el par del rotor principal. Revomix es independiente de la emisora. Por defecto está desactivado, el usuario debe ajustar la cantidad requerida de la pre-compensación. |
| − | Los valores permitidos son 0 a 10 donde 0 es desactivado; en la mayoría de los casos no es necesario el uso de este parámetro, sin embargo, | + | Los valores permitidos son 0 a 10 donde 0 es desactivado; en la mayoría de los casos no es necesario el uso de este parámetro, sin embargo, si utiliza bajas rpm de rotor o en helicópteros con poca potencia de cola, utilice este parámetro. |
| − | '''Pirouette consistency (Consistencia de pirueta)'''<br />Este parámetro | + | '''Pirouette consistency (Consistencia de pirueta)'''<br />Este parámetro ajusta la consistencia de las piruetas de cola y su capacidad de mantenimiento. Si las piruetas de cola no son consistentes durante ciertas maniobras, aumente el valor de este parámetro. |
| − | Este valor es | + | Este valor es particular para cada modelo, depende de muchos factores como: su mecánica de cola, velocidad del rotor, etc. Antes de configurar este parámetro, se recomienda ajustar primero las ganancias del giróscopo. |
| − | Si el valor es demasiado alto, la cola puede oscilar | + | Si el valor es demasiado alto, la cola puede oscilar. También puede causar malas paradas de la cola. Este valor debe estar entre 150 y 180. |
| + | Para servos brushless se recomienda aumentar el valor por unos 10-15 puntos. | ||
| − | ====EXPERT SETTINGS (AJUSTES EXPERTOS)==== | + | ====EXPERT SETTINGS (AJUSTES PARA EXPERTOS)==== |
| − | Para una puesta a punto fina se | + | Para una puesta a punto fina se ajustar los siguientes parámetros. Normalmente no es necesario ajustar estos parámetros. |
| − | parámetros. | + | |
| − | [[File:Expen.png|center| | + | [[File:Expen.png|center|450px]] |
| − | '''Rotor Rotation Direction ( | + | '''Rotor Rotation Direction (Dirección de giro del rotor)'''<br />Parámetro para determinar la dirección de rotación del rotor principal. En la mayoría de los casos es en sentido horario - parámetro desmarcado. |
| − | '''Stick deadband ( | + | '''Stick deadband (Zona muerta del stick)'''<br />Determina la zona alrededor de la posición neutra del stick, en la que el sistema no reconoce ningún movimiento del mismo. Si las lecturas del canal son imprecisas aumente el valor. Esto se puede comprobar en la pestaña Diagnostics. Este parámetro no reemplaza la función exponencial. |
| − | valor | + | |
| − | '''Elevator pitchup compensation ( | + | '''Elevator pitchup compensation (Compensación de morro arriba)'''<br />Si durante el vuelo rápido en traslación el modelo reacciona a las entradas demasiado rápido o si el modelo tiende a levantar el morro, aumente este valor hasta que esto ya no ocurra. Si el helicóptero levanta el morro repentinamente, esto podría ser debido a un bajo recorrido de cíclico y/o a un excesivo paso colectivo. En este caso, aumente los recorridos de Alerón/Elevador tan alto como sea posible sin forzar los mecanismos. Si esto no soluciona el problema, puede aumentar más la compensación de morro arriba. |
| − | hasta que esto ya no ocurra. | + | |
| − | Si el helicóptero | + | |
| − | '''Cyclic phase (Fase | + | '''Cyclic phase (Fase de cíclico)'''<br />El valor indica el ángulo de desfase virtual del plato cíclico. |
| + | Por ejemplo, un valor de 90 hará que se aplique alerón a comandos de elevador. Este ajuste es útil para rotores con cabeza multi-pala. Para la mayoría de los otros modelos, se recomienda un valor de cero. | ||
| − | '''Pitch Pump Booster ( | + | '''Pitch Pump Booster (Amplificación de colectivo)'''<br />Para lograr un comportamiento del paso colectivo similar al de rotores con flybar, incremente el valor hasta que se alcance el tacto deseado. Recuerde que valores altos son demasiado exigentes para la alimentación de la electrónica y los servos. |
| − | ''' | + | '''Anti-Gravity'''<br />You can equalize throw for a positive and negative pitch. So that pilot can feel it flys similarly fast up and down. With increased value pitch difference for positive and negative collective will enlarge. It also calculate such difference based on attitude of the model. When it is skids down Anti-Gravity apply in an inverted manner. In other words pilot will feel that the model is lighter in the air. Recommended rather for a smaller models. |
| − | ''' | + | '''Rescue - Smoothing factor'''<br />To reduce demand for model mechanics please increase the value. It will make a slower movements to reduce current spike and possible overload of the BEC/battery. This will increase safety of the Rescue maneuver, however too high value will result in a slower recovery. |
| − | {{Info|[[File:Info.png]] | + | '''Signal processing (Procesamiento de señal)'''<br />Este parámetro se utiliza para la operación en modelos con vibraciones extremas que no pueden ser eliminadas de otra forma. Aumenta la precisión en los modos Rescate/Estabilización/GeoLink si los ajustes por defecto no son satisfactorios. Por ejemplo, si los modos Rescate o Estabilización mantienen una inclinación constante en alguno de los ejes tras su activación incluso en maniobras básicas, active este parámetro. |
| + | |||
| + | '''Flybar mechanic (Flybar mecánico)'''<br />Si el helicóptero está equipado con un rotor tradicional con flybar, habilite este parámetro con el fin de utilizar los modos de Estabilización o Rescate. Todos los ajustes son los mismos para helicópteros con flybar excepto este parámetro. | ||
| + | |||
| + | {{Info|[[File:Info.png]] Los helicópteros flybarless deben configurarse y operarse con el parámetro Flybar mechanic desactivado. | ||
}} | }} | ||
| − | '''RPM Sensor Filter (Filtro | + | '''RPM Sensor Filter (Filtro de sensor RPM)'''<br />En caso de que su sensor de RPM presente una salida ruidosa el valor de RPM puede ser muy inestable. Esto puede dar lugar a diversos problemas con el Governor. Puede haber un problema durante el arranque, cambio de modo de vuelo o inestabilidad en el mantenimiento de las rpm del rotor. Para aumentar la precisión de lectura de las RPM, aumente el valor del parámetro. |
| − | + | Por otro lado, un valor demasiado alto puede producir retrasos, que no son buenos para un funcionamiento óptimo del Governor. Por lo cual, el valor debe ser tan bajo como sea posible mientras que la lectura de RPM siga siendo precisa. Variaciones de 1-20 RPM respecto de las RPM de consigna se consideran como óptimas. | |
| − | '''Tasa de | + | '''Autorotation Bailout rate (Tasa de Rescate de Autorotación)'''<br /> |
| − | Cuando se realiza | + | Cuando se realiza una autorotación, la función de rescate está disponible. El rescate se utiliza para recuperar las RPM del rotor más rápido de lo normal con el fin de lograr RPM útiles pronto. De esta manera el piloto puede recuperar el control total del modelo y continuar con el vuelo. Si utiliza el Governor del Spirit puede utilizar este parámetro para ajustar de manera precisa la velocidad con la que se recuperan las RPM durante el rescate de autorotación. Cuando el Governor del Spirit está desactivado, esta configuración no tiene ningún efecto. |
| − | '''Rudder - Control Type'''<br /> | + | '''Rudder - Control Type (Tipo de control de cola)'''<br /> |
| − | + | En las unidades µSpirit es posible activar el soporte de motores dedicados para rotor de cola. En este caso se utilizarán dos variadores, el variador del motor de cola se conecta al puerto CH4. Es importante ajustar ''Limits/Rudder ESC - range'' adecuadamente ya que así se define el rango de funcionamiento del variador de cola entre 0 y 100%. | |
| − | + | Este parámetro se encuentra normalmente en el Asistente de Ajuste. | |
| − | '''Stabi Correction'''<br/> | + | '''Stabi Correction (Corrección Stabi)'''<br/> |
| − | + | Active este parámetro si el Rescate, Estabilización o GeoLink no son precisos con los ajustes por defecto. | |
| − | + | Actívelo únicamente si el modelo se encuentra en buenas condiciones. Adecuado para pilotos volando figuras complicadas. | |
| − | + | Este modo ofrece el mejor rendimiento en cualquier tipo de maniobra. El único requisito para ser utilizado es que el modelo no tenga ningún tipo de vibración que pueda afectar al sistema. Si no está seguro, utilice Vibration Analysis para comprobar las vibraciones o consúltelo con nosotros. | |
| − | ====TELEMETRY SETTINGS==== | + | ====TELEMETRY SETTINGS (AJUSTES DE TELEMETRIA)==== |
| − | + | La Telemetría de Variador activa la transmisión de variables de telemetría desde el variador a su emisora. Descrito en la página de [[ESC telemetry/es|Telemetría de Variador]]. | |
| − | === BACKUP | + | === BACKUP (COPIA DE SEGURIDAD) === |
| − | Aquí | + | Aquí puede guardar la configuración de su unidad Spirit antes de apagarla, también puede guardar la configuración en su ordenador por si necesitase cargarla de vuelta en un futuro. |
[[File:9en.png|center|500px]] | [[File:9en.png|center|500px]] | ||
| − | '''Profile (Perfil)'''<br />Esta sección le permite '' | + | '''Profile (Perfil)'''<br />Esta sección le permite ''Save (Guardar)'' y ''Load (Cargar)'' configuraciones completas de la unidad a/de un archivo específico. Si tiene más de una unidad del mismo modelo, no es necesario llevar a cabo una configuración completa de nuevo, sólo tiene que cargar los ajustes almacenados mediante el botón ''Load (Cargar)''. |
| − | Si | + | |
| − | '''Unit (Unidad)'''<br />Cualquier cambio en la configuración se pueden guardar en cualquier momento | + | '''Unit (Unidad)'''<br />Cualquier cambio en la configuración se pueden guardar en cualquier momento en la memoria flash interna de la unidad. |
| + | Para restablecer todos los ajustes a los valores de fábrica, haga clic en ''Factory Settings''. | ||
| − | {{Info|[[File:Info.png]] Recuerde guardar los ajustes cada vez que desee almacenar la configuración de forma permanente. Debe pulsar el botón Guardar. De lo contrario, los cambios se perderán | + | {{Info|[[File:Info.png]] Recuerde guardar los ajustes cada vez que desee almacenar la configuración de forma permanente. Debe pulsar el botón Save (Guardar). De lo contrario, los cambios se perderán una vez la unidad Spirit se apague. |
}} | }} | ||
| − | '''Bank Switching ( | + | '''Bank Switching (Conmutación de banco)'''<br />En caso de tener habilitada la Conmutación de banco, puede guardar la configuración de un solo banco o incluso de todos. Para ver las diferencias entre bancos puede utilizar la función de comparación de banco. |
| − | diferencias entre bancos puede utilizar la función de comparación | + | |
| − | === UPDATE TAB ( | + | === UPDATE TAB (Actualización) === |
| − | Si desea actualizar el firmware, puede hacerlo en esta | + | Si desea actualizar el firmware de su unidad, puede hacerlo en esta pestaña. |
[[File:10en.png|center|500px]] | [[File:10en.png|center|500px]] | ||
| Line 627: | Line 634: | ||
'''Firmware'''<br /> | '''Firmware'''<br /> | ||
| − | + | Primero, seleccione el archivo de datos que contiene el firmware (*.4df) - ''Select button'' (''Botón de selección''). Una vez seleccionado el archivo, presione ''Flash button''. El progreso de la actualización se mostrará aquí. Una vez terminado, un diálogo de confirmación aparecerá indicando la correcta actualización. | |
| − | + | A continuación, desenchufe la unidad de su fuente de alimentación. | |
| − | + | En el siguiente arranque, la unidad cargará el firmware que acaba de actualizar. | |
| − | + | You can restart the Spirit Settings software when unit will reinitialize and continue with setup. | |
| − | + | ||
| − | + | ||
| − | + | ||
| + | La configuración de la unidad no se toca durante el proceso de actualización, por lo cual no es necesario hacer una copia para luego restaurarla. | ||
| + | {{Info|[[File:Info.png|18px|]] Firmware update can be made only with Internet Connection. It is downloaded automatically from Spirit Server.}} | ||
| + | <p></p> | ||
== BANK SWITCHING (CAMBIO DE BANCO) == | == BANK SWITCHING (CAMBIO DE BANCO) == | ||
| − | Esta funcionalidad le permite cambiar entre | + | Esta funcionalidad le permite cambiar en vuelo entre varios ajustes guardados. La conmutación se realiza desde su emisora mediante el estado de un canal. |
| + | Esto significa que un banco puede almacenar una cierta configuración. La unidad es capaz de almacenar 3 bancos diferentes. | ||
| − | + | Para cambiar libremente entre los bancos puede utilizar un interruptor de tres posiciones. | |
| − | + | La capacidad de cambio de banco está desactivada por defecto, por lo cual usted puede decidir si le resulta útil o no. Debe activarla asignando la función 'Bank'' en la pantalla ''General/Channels''. | |
| + | Generalmente, se asigna al canal 7. | ||
| − | :''Bank 0'' – activo en | + | :''Bank 0'' – activo en el rango del tercio inferior (por debajo 1400μs).<br /> |
| − | :''Bank 1'' – activo en | + | :''Bank 1'' – activo en el rango del tercio intermedio (entre 1400μs y 1640μs).<br /> |
| − | :''Bank 2'' – activo en el rango del tercio superior ( | + | :''Bank 2'' – activo en el rango del tercio superior (superior a 1640μs).<br /> |
| − | Los ajustes iniciales para el ''Banco 1 y Banco 2'' son | + | Los ajustes iniciales para el ''Banco 1'' y ''Banco 2'' son los mismos que para el ''Banco 0''. El ''Banco 0'' le permite configurar todos los parámetros, mientras que ''Banco 1 y 2'' no permiten ajustar los parámetros principales, que permanecerán comunes a los tres. Por razones de seguridad, el ''Banco 1 y 2'' no le permiten establecer ninguno de los parámetros principales. |
| − | + | El cambio de Banco es ideal para cambiar entre estilos de vuelo, ajustar las ganancias de los sensores a RPM bajas o altas, para acrobacias suaves o 3D. Como alternativa se puede utilizar sólo para afinar los ajustes. | |
| − | {{Info|[[File:Info.png|18px|]] | + | {{Info|[[File:Info.png|18px|]] Si la unidad se encuentra conectada al ordenador o a una emisora completamente integrada estando en el menú de ajuste, el cambio de Banco desde la emisora estará temporalmente deshabilitado. Si desea cambiar de Banco en estas condiciones, lo puede hacer pulsando el botón a tal efecto en la parte inferior de la ventana del software o emisora. |
| − | + | Cuando se cambia de Banco desde el software, es necesario guardar los parámetros modificados antes de cambiar de Bancos, si no es así los cambios realizados se perderán, volviendo al anterior estado.}} | |
| − | + | ||
<p></p> | <p></p> | ||
| − | {{Info|[[File:Info.png|18px|]] | + | {{Info|[[File:Info.png|18px|]] Cierre siempre el software o cualquier app conectada antes de volar. Si no lo hace, no podrá cambiar de Banco en vuelo.}} |
<p></p> | <p></p> | ||
| − | {{Info|[[File:Info.png|18px|]] Para comprobar que | + | {{Info|[[File:Info.png|18px|]] Para comprobar que el cambio de Banco funciona correctamente, inicie el software y observe la pestaña de diagnóstico. Allí usted puede ver el indicador del Banco con el valor de su canal. Intente cambiar la posición del interruptor asignado. Si todo está correcto, verá que el número de banco cambiará.}} |
== GOVERNOR == | == GOVERNOR == | ||
| − | Governor | + | El Governor es una función que le ayuda a mantener constantes las RPM de su rotor. Puede usare esta función en vez del governor interno de su variador u otro tipo de governor. Está diseñado para funcionar con helicópteros eléctricos, nitro y gasolina. |
| + | El rendimiento de su motor puede ser incluso mejor al utilizar Governor. | ||
| − | + | Para lograr un buen funcionamiento es muy importante realizar una configuración correcta. Antes de nada, asegúrese que el governor de su variador se encuentra desactivado. | |
| − | Es necesario | + | Es necesario retirar las palas de su modelo antes de realizar la configuración del governor. No haga ningún ajuste con el motor encendido. |
| − | + | Es necesario utilizar la salida de Throttle (motor) de la unidad cuando se utilice el Governor de su Spirit. | |
| − | + | Lista de sensores de rpm soportados y su cableado disponible en la página [[Governor/es|Governor]] . | |
| − | == SOFTWARE | + | == CONTROL DEL SOFTWARE MEDIANTE TECLADO == |
| − | Para | + | Para una configuración más rápida y fácil se han implementado en el software los controles mediante teclado. |
{| style="text-align:left;" | {| style="text-align:left;" | ||
|'''Atajo''' | |'''Atajo''' | ||
| − | |''' | + | |'''Función''' |
|- | |- | ||
|F1 a F10 | |F1 a F10 | ||
| Line 691: | Line 700: | ||
|- | |- | ||
|CTRL + S | |CTRL + S | ||
| − | |Guardar | + | |Guardar configuración en unidad. |
|- | |- | ||
|CTRL + P | |CTRL + P | ||
| − | |Guardar | + | |Guardar configuración en su ordenador. |
|- | |- | ||
|CTRL + L | |CTRL + L | ||
| − | | | + | |Cargar a la unidad una configuración desde su ordenador. |
|- | |- | ||
|CTRL + W | |CTRL + W | ||
| Line 706: | Line 715: | ||
|- | |- | ||
|Tab | |Tab | ||
| − | |Cambiar entre | + | |Cambiar entre parámetros. |
|- | |- | ||
|Space | |Space | ||
| − | | | + | |Selección de parámetro / opción. |
|- | |- | ||
| − | | | + | |Flechas |
|Incrementar / Disminuir valores. | |Incrementar / Disminuir valores. | ||
|- | |- | ||
| − | | | + | |Av Pag / Re Pag |
|Aumentar / disminuir el valor por decenas. | |Aumentar / disminuir el valor por decenas. | ||
|- | |- | ||
| − | | | + | |Inicio |
| − | |Establecer valor | + | |Establecer el valor más bajo. |
|- | |- | ||
| − | | | + | |Fin |
|Establecer valor mas alto. | |Establecer valor mas alto. | ||
|- | |- | ||
| Line 731: | Line 740: | ||
|- | |- | ||
| style="width: 33%;"| [[Wiring/es|← Cableado]] | | style="width: 33%;"| [[Wiring/es|← Cableado]] | ||
| − | | style="width: 33%;text-align:center;"| [[#up|↑ | + | | style="width: 33%;text-align:center;"| [[#up|↑Arriba↑]] |
| style="text-align:right;" | [[ First flight/es| Primer vuelo →]] | | style="text-align:right;" | [[ First flight/es| Primer vuelo →]] | ||
|} | |} | ||
---- | ---- | ||
</div> | </div> | ||
Latest revision as of 07:50, 19 September 2022
La configuración es paso siguiente y uno de los más importantes para el correcto funcionamiento del sistema.La configuración se realiza mediante el software, que combina la eficiencia y simplicidad al tiempo que ofrece parámetros ajustables, incluyendo parámetros avanzados.
El software ofrece un Asistente de Configuración. Se recomienda utilizar el asistente ya que le guiará a través de la toda configuración desde los primeros ajustes hasta el primer vuelo.
Contents
- 1 CONEXION AL PC
- 2 CONEXION CON LA UNIDAD
- 3 INSTALACION DEL SOFTWARE DE CONFIGURACION
- 4 INICIO DEL SOFTWARE DE CONFIGURACION
- 5 USO DEL SOFTWARE
- 6 BANK SWITCHING (CAMBIO DE BANCO)
- 7 GOVERNOR
- 8 CONTROL DEL SOFTWARE MEDIANTE TECLADO
1 CONEXION AL PC
Antes de comenzar con la configuración, es necesario conectar la unidad a un ordenador mediante un puerto USB. Dependiendo del sistema operativo y el ordenador, puede necesitar instalar el controlador correspondiente una vez conecte el cable a un puerto USB.
El software de configuración Spirit está disponible para los siguientes sistemas operativos:
Una vez se establezca la conexión y se instale el controlador con éxito aparecerá un nuevo puerto COM virtual en el administrador de dispositivos de su ordenador.
Please install software and USB driver according guide.
1.1 WIFI-LINK
El software de configuración Spirit puede ahora utilizar un módulo Wifi. Dicho dispositivo Spirit Wifi-Link puede reemplazar completamente la interfaz usb. Así el usuario puede realizar todos los ajustes de manera inalámbrica. Puede encontrar ayuda para su conexión en la página del Wifi-Link.
2 CONEXION CON LA UNIDAD
Si ya ha conectado la interfaz USB al ordenador, lo siguiente es conectar el cable de la interfaz al puerto SYS de la unidad Spirit. La unidad Spirit no se alimenta desde el puerto SYS por lo que es necesario alimentarlo ya sea desde el receptor, un BEC o una batería externa. Los puertos RUD y AUX se pueden utilizar para alimentar la unidad Spirit, si usa un BEC o un pack de baterías se recomienda utilizar una tensión de alimentación entre 3V y 15V. El cable central del conector es el positivo de alimentación.
Nunca alimente la unidad por el puerto SYS o ELE/PIT/ELE.
Si la unidad no esta configurada (por ejemplo, una nueva unidad) se recomienda no conectar los servos todavía.
3 INSTALACION DEL SOFTWARE DE CONFIGURACION
Below are the installation instructions for the supported platforms. The configuration software is available on the Spirit System website: spirit-system.com.
3.1 MICROSOFT WINDOWS
Ejecute el instalador y siga el asistente. Si el controlador no está instalado todavía, se le dará la opción de hacerlo durante el proceso de instalación. El instalador pasa por todos los pasos necesarios para preparar el equipo para ejecutar el software de configuración. Una vez finalizado el proceso de instalación, el software de configuración se podrá iniciar desde el escritorio o desde el listado de programas, „Spirit Settings“.
Para más información sobre la instalación, ejecución y resolución de problemas de Spirit Settings vaya a la página Ajuste del Spirit bajo Windows
3.2 APPLE MAC OS
Install the downloaded software by opening the DMG file and then moving the content to your Desktop or Application folder. Configuration software can be launched with “Spirit-Settings“ icon.
For detailed guide for Spirit Settings installation, launching and troubleshooting open Spirit Settings under Mac page.
3.3 GNU/LINUX and FreeBSD
Extraiga todos los ficheros desde el fichero comprimido descargado, por ejemplo en su carpeta de inicio. El Software de Configuración se puede iniciar desde el directorio recién creado ejecutando el archivo „settings.sh“.
La guía de instalación para Linux Mint (o compatible) se encuentra en la página Ajuste del Spirit bajo Linux.
4 INICIO DEL SOFTWARE DE CONFIGURACION
Una vez instalado el software, asegúrese de que su unidad Spirit está conectada a través del USB al puerto SYS, encendida e inicializada (los LED están encendidos), a continuación, ejecute el software en su ordenador.
Inicie Spirit Settings desde su escritorio o en la carpeta donde fue instalado.
5 USO DEL SOFTWARE
Una vez el Spirit se conecte de manera satisfactoria puede acceder a todas sus opciones. Si no se conecta, trate de elegir otro puerto COM (Device) o trate de reiniciar la aplicación, interrumpa la alimentación de la unidad y repita el procedimiento.
Asegúrese de ejecutar el software una vez la unidad se haya inicializado.
5.1 CONNECTION (Conexión)
Esta pestaña indica el estado actual de la conexión, le informa acerca de la versión actual del firmware, muestra el número de serie de la unidad conectada y le permite cambiar el puerto COM. Además cuenta con un asistente para la configuración inicial de su unidad.

Se recomienda utilizar este asistente, ya que le guiará a través de una configuración básica de la manera más fácil y sencilla.
5.2 GENERAL
Si ya ha configurado la unidad mediante el asistente, aquí puede realizar ajustes adicionales en su configuración. Todos los ajustes que vea serán los realizados en el asistente.

Position (Orientación)
Seleccione la orientación en la que la unidad fue montada en el modelo.
(Vea la sección 3 - Instalación)
Swashplate (Plato cíclico)
Seleccione el tipo de plato cíclico de su modelo.
En la mayoría de los casos es CCPM 120° o 120° CCPM (reversed).
Se debe desactivar cualquier tipo de mezcla de plato de la emisora. Se ajustar a H1 (un servo por cada función).
Receiver (Receptor)
Seleccione el tipo de receptor que está utilizando:
- PWM – receptor estándar (PWM).
- PPM – conexión mediante un único cable.
- Spektrum DSM2/DSMX – Satélite DSM2 o DSMX, o receptor SPM4649T.(para Integración Spektrum).
- Futaba S-BUS – receptor conectado via SBUS. (para Telemetría Futaba)
- Jeti EX Bus – receptor conectado via EX Bus (para Integración JETI Model).
- SRXL/SUMD – receptor conectado via SRXL, SUMD, UDI.
- SRXL2 – receiver connected via SRXL2 (more details at Spektrum SRXL2).
- FrSky F.Port – receiver connected via F.Port (more details at FrSky F.Port).
Flight style (estilo de vuelo)
Ajusta como se comportará el modelo en vuelo.
Este parámetro se utiliza para ajustar y adaptar el comportamiento en vuelo según los requisitos del piloto. Tiene gran impacto en maniobras de cíclico per no en maniobras basadas en cola.
Este parámetro no influye en la estabilidad. Cuanto más grande es el modelo, es recomendable ajustarlo a un valor más alto.
Valores bajos harán que el modelo se comporte de una manera más controlada y consistente y dará una sensación de control lineal y robótica. Puede aparecer un pequeño retardo en el control. El momento angular se mantendrá de manera más constante.
Valores más altos llevan a un comportamiento más natural. La respuesta a los movimientos del stick será más parecida a la de un helicóptero con barra estabilizadora donde movimientos rápidos producen una respuesta más agresiva. Los movimientos en la zona central del stick serán más precisos. Puede ayudarle a hacer tic-tocs de manera más rápida. Podrá llegar de manera más rápida a los extremos de los recorridos del cíclico.
El valor recomendado para la mayoría de los pilotos es: 4.
Channels (Canales)
Después de hacer clic en el botón, se mostrará la ventana de asignación de canales.
Aquí puede asignar cualquier canal a cualquier función. El número de canales disponibles depende del tipo de receptor. Recuerde asignar sólo un canal a cada función.
Cuando se asigna un canal para la función de Throttle (motor), la salida de motor de la unidad se puede obtener de la posición AUX.
Si se asigna un canal para la función Bank, se activará la función de conmutación de Bancos (véase el capítulo 5.6).
Si no se asigna un canal para la función Gyro Gain, es posible configurar la ganancia del giróscopo directamente a través de este programa en la pestaña Sensor. El canal que queda libre puede usarse para otra función, por ejemplo para conmutar entre los diferentes Bancos.

Failsafe
Para tipos de receptor PPM, Spektrum DSM2/X, Jeti EX Bus, SRXL/SMUD puede ajustar el Failsafe directamente en la unidad. Los valores actuales se almacenarán como valores Failsafe inmediatamente al hacer click en el botón Set Failsafe. En caso de que la señal de control se pierda durante más de 1 segundo en vuelo, se aplicarán los valores establecidos.
Con otros tipos de receptor, el Failsafe se ajusta desde la emisora o desde el propio receptor.
Realtime tuning (Ajuste en tiempo real)
Mediante la asignación de un parámetro (P) , es posible cambiar los ajustes directamente desde su emisora.
Puede ajustar dicho parámetro de una manera muy cómoda cambiando el valor del canal correspondiente (por ejemplo mediante un potenciómetro).
Por lo cual, no necesitará el software de configuración para ello. Con su emisora será suficiente.
Un cambio en el canal correspondiente cambiará inmediatamente el valor del parámetro. El recorrido máximo del canal en la emisora ajustará el valor más alto a alcanzar en el parámetro, mientras que el recorrido mínimo ajustará el valor más bajo.
El ajuste de parámetros en tiempo real tiene la más alta prioridad en el ajuste final. Por lo cual, si se activa, el valor almacenado como ajuste en el software o el valor del Banco será ignorado.
Esta funcionalidad sólo funciona si el software de configuración no está conectado. Esto evitará cualquier tipo de accidente. Tan pronto como se desconecta el software, el parámetro seleccionado se configura por el valor del canal. En caso de que el software se inicie de nuevo, mantendrá el valor de ajuste en tiempo real en su memoria. Sin embargo, cuando se inicie el software, se aplicará el funcionamiento mencionado más arriba (el ajuste en tiempo real se desactivará y el valor se mantendrá intacto incluso si cambia de canal).
Puede configurar hasta 3 parámetros diferentes y simultáneos con esta función.
Si se asigna la función (F) , se activará cuando su valor sea igual a 1. La función Vibration analysis (Análisis de Vibraciones) le permite medir las vibraciones durante el vuelo. Se describe más adelante en la sección Diagnostic (Diagnóstico).
Cuando termine la fase de ajuste, se recomienda utilizar el software para almacenar el ajuste decidido en la unidad. Después des-asigne el parámetro para que el valor no pueda ser modificado por error.
5.3 DIAGNOSTIC (DIAGNOSTICO)
Una vez que los ajustes de la pestaña anterior se han terminado, se recomienda ahora hacer los ajustes y cambios necesarios en la emisora para que los controles coincidan con las salidas de la unidad mostradas. Generalmente, cada emisora es diferente y el centro de sus canales no suele ser exactamente el mismo. El desgaste y las influencias ambientales pueden también afectar, haciendo que el centrado de los canales varíe. Otro punto es el valor máximo y mínimo de cada canal. Aquí, ajustará los límites mediante el ajuste de recorridos de servo de su emisora.

En segundo lugar, es necesario comprobar los valores de los canales alerón, elevador, paso y cola. Estos canales deben estar centrados en aproximadamente 0%. La unidad detecta automáticamente la posición neutral durante cada inicialización. No utilice el ajuste de trim o subtrim en su emisora para estos canales, ya que si no, la unidad Spirit los considerará como un comando.
Asegúrese de que todos los ajustes subtrim y trim estén a cero.
También se recomienda establecer los valores máximos y mínimos. Pruebe los recorridos mínimo y máximo para todos los canales, si estos valores no son iguales a -100% y 100% en la pestaña Diagnostic es necesario ajustar los recorridos de los canales de su emisora hasta corregirlo.
Después de realizar estos ajustes, todo lo referente a la emisora debería estar configurado. Si algún canal oscila alrededor del centro, puede significar un desgaste de los potenciómetros de la emisora. Esto puede ser compensado incrementando el valor Stick deadband (zona muerta) en la pestaña Advanced (Avanzado). (Se explica más adelante)
Si se muestran en negrita los valores de alerón, elevador, o cola, el sistema está detectando un comando en alguno de los ejes nombrados.
Para ajustar Gyro Gain y el Modo del giróscopo de cola, compruebe la barra Gyro.
5.3.1 SPECTRUM ANALYSER (ANALIZADOR VIBRACIONES)
El analizador de espectro es una herramienta para medir la cantidad de vibraciones en su modelo. Es una herramienta de diagnóstico diseñada para determinar qué parte giratoria está causando un problema. Con esta información usted puede fácilmente identificar y solucionar los problemas con su modelo.
Para comprobar el estado del modelo puede observar la barra "Vibrations" (Vibraciones). Esto indica la amplitud de la vibración general en el eje seleccionado.
Es posible medir las vibraciones en tres ejes independientes:
- X - elevator axis (elevador)
- Y - aileron axis (alerón)
- Z - rudder axis (cola)
- In-Flight - Vibraciones en tiempo real
El gráfico muestra las frecuencias en tiempo real para el eje seleccionado. Esto le permite ver tanto la frecuencia como la magnitud de la vibración en el eje seleccionado.
Las vibraciones se transmiten a cada uno de los ejes dependiendo de varios factores. La frecuencia y la magnitud dependen de la construcción del modelo. En general, las vibraciones son más altas en el eje Y (alerones), pero le recomendamos que revise todos los ejes cada vez que realice una comprobación. Las vibraciones no deben exceder de 50% en ningún caso, para cualquiera de los ejes. En el caso que las vibraciones estén a 90% o superior, el modelo tiene un problema que necesita ser corregido inmediatamente. En caso de que la magnitud sea superior al 90% en cualquiera de los ejes, se recomienda arreglar el problema causante de las vibraciones antes de volar de nuevo el modelo. A pesar de que la unidad de Spirit es altamente resistente a las vibraciones, éstas podrían causar interacciones no deseadas con la unidad Spirit además de poder causar un problema mecánico en su modelo. Vibraciones tan altas pueden hacer que incluso que el fijatornillos no sea suficiente para sujetar algunas piezas o incluso puedan producirse roturas en piezas clave de su helicóptero.
Niveles de vibración:
- Vibraciones hasta 50% - niveles de vibración aceptables y normales
- Vibraciones entre 50% y 90% - niveles elevados de vibraciones
- Vibraciones que excedan 90% - niveles de vibración extremas
Además de no superar un 50% a nivel general, cualquier frecuencia específica (pico) no debe exceder de 50%. Cualquier valor por encima de este nivel debe ser motivo de preocupación y requiere de una investigación.
Para comparar diferentes gráficos, puede utilizar el botón Freeze (congelar). Los valores en tiempo real se seguirán mostrando pero el instante capturado mediante el botón Freeze se guardará y se mostrará superpuesto. Este gráfico se puede borrar con el botón Clear.
Es posible guardar las gráficas del analizador de espectro. Mediante el botón To image, el gráfico actual se guardará como una imagen.
El analizador de vibraciones es capaz de detectar frecuencias de vibración de hasta 500 Hz (piezas girando a velocidades de hasta 30.000RPM).

Procedimiento de medición.
- Retire las palas principales y de cola del modelo.
- Coloque el modelo en una superficie adecuada y mullida (por ejemplo una alfombra o hierba).
- Ajuste el paso de los rotores principal y de cola a aproximadamente 0 °.
- Ejecute el analizador de espectro (todos los servos se bloquearán).
- Haga girar el motor a la RPM de vuelo normal.
- Seleccione los distintos ejes X, Y y Z, guarde una imagen de cada uno.
- Verifique las vibraciones en todos los ejes.
- Pare el motor.
Identificación de vibraciones
Mediante la velocidad de los picos más altos podrá identificar el componente o parte causante de las vibraciones. El rotor principal tiene la velocidad más baja y la velocidad del rotor de cola será de aproximadamente 4.5 veces mayor. En general, cuanto menor es el tamaño del modelo, mayor es la velocidad del rotor.
Con el fin de averiguar qué parte del modelo está causando las vibraciones no deseadas, mueva el cursor sobre el pico sospechoso correspondiente, la velocidad de giro (RPM) se mostrará en pantalla. La velocidad del rotor principal está normalmente en el rango de 1500 a 3500 RPM. Por lo tanto, si la velocidad está dentro de este intervalo, es probable que exista un problema con el engranaje principal, eje principal, los cojinetes del eje principal o la cabeza del rotor en sí.
La mayoría de las vibraciones excesivas suelen estar, aunque no siempre, relacionadas con la cola. Para comprobar si hay vibraciones procedentes de la cola, debe buscar un pico de frecuencia a aproximadamente 4.5 veces la frecuencia del rotor principal.
Una vez identifique qué parte del helicóptero está causando las vibraciones no deseadas, puede poco a poco ir eliminando los componentes del conjunto sospechoso, repitiendo el proceso de medición hasta que la vibración desaparezca. Una vez que los niveles de vibración se hayan reducido a un nivel aceptable, habrá encontrado la parte defectuosa y podrá remplazarla.
La medición de vibraciones con las palas de cola montadas conlleva un gran riesgo, pudiendo observar además mayores niveles de vibración.
Análisis de vibraciones en vuelo
Esta función le permite grabar el espectro de vibraciones en cualquier momento del vuelo. Mediante el canal seleccionado se le puede indicar a la unidad cuándo el espectro debe ser guardado. Los datos pueden ser analizados más tarde en el software de configuración de Spirit mediante la opción In-Flight dentro de Spektrum Analizer en la pestaña Diagnostic. La gráfica de vibraciones guardada se almacenará hasta que la unidad se apague. El registro se sobre-escribirá cada vez que actúe sobre el canal elegido.
Para medir vibraciones en vuelo asigne la función adecuada dentro del menú Channels dentro de la pestaña General. Asigne la función F: Spektrum Analysis con el eje que desea medir. A continuación, seleccione en el canal de su receptor que activará la función.
Tan pronto como el valor sea igual a 1 se guardará el espectro de vibraciones. El registro se guarda exactamente en el momento en que la función cambia su estado de 0 a 1.
Durante el vuelo tan solo debe activar el cambio de estado desde su emisora (por ejemplo mediante un interruptor de 2 estados). Tras aterrizar, puede conectar la unidad con el software y abrir el analizador de vibraciones (seleccione el eje In-Flight para mostrar el espectro).
5.3.2 BEC TESTER (TEST DE BEC)
Este test se utiliza para determinar si la fuente de alimentación de su unidad, el receptor y los servos es suficiente. El propósito es lograr el mayor pico de corriente y comprobar que la tensión de alimentación no cae por debajo de un nivel seguro.

Haga clic en el botón Start (Inicio) para iniciar la prueba. Después de 20 segundos deberá haberse terminado.
Si durante el test observa cualquier problema, su fuente de alimentación es insuficiente y no se debe utilizar. En este caso, debe buscar una fuente de alimentación de mayor potencia.
5.3.3 LOG VIEWER (REGISTRO DE VUELO)
El registro de vuelo se usa para grabar eventos durante el mismo. Si se produce un problema y la razón no es evidente, puede comprobar el log para ayudarle a identificar el problema.
Funciona de tal manera que registra todos los eventos desde el momento en que la unidad se enciende. Si se produce un evento se puede ver esto en el registro, las entradas del log aparecen en intervalos fijos de 10 segundos. Al hacer clic en el botón Open logpodrá acceder al log de vuelo actual que contiene todos los eventos desde el último vuelo. Una vez el sistema se apague, el registro se reinicia.
En el caso de que ocurra un problema importante durante el vuelo ![]() el log se almacenará entonces permanentemente en la memoria de la unidad, quedando almacenado hasta que se abra el registro.
Si existe un registro de error guardado en la memoria, el usuario será advertido con el mensaje “Log from previous flight is available!” (Registro de un vuelo anterior disponible!) y el registro de vuelo en el momento de sucederse el error ser mostrará al abrirse. Por ejemplo, si se pierde la señal de receptor o si existe un fallo en la alimentación podrá encontrar esta información en el registro. El registro del primer vuelo donde se produjo un problema estará siempre almacenado. Si no se abre, nunca será sobre-escrito por un error posterior. Si esto sucede, el usuario será también notificado mediante un movimiento de plato cíclico diferente durante el proceso de inicialización.
el log se almacenará entonces permanentemente en la memoria de la unidad, quedando almacenado hasta que se abra el registro.
Si existe un registro de error guardado en la memoria, el usuario será advertido con el mensaje “Log from previous flight is available!” (Registro de un vuelo anterior disponible!) y el registro de vuelo en el momento de sucederse el error ser mostrará al abrirse. Por ejemplo, si se pierde la señal de receptor o si existe un fallo en la alimentación podrá encontrar esta información en el registro. El registro del primer vuelo donde se produjo un problema estará siempre almacenado. Si no se abre, nunca será sobre-escrito por un error posterior. Si esto sucede, el usuario será también notificado mediante un movimiento de plato cíclico diferente durante el proceso de inicialización.
El registro puede contener los siguientes eventos:
![]() Good Health Message (mensaje Buena Salud):
Good Health Message (mensaje Buena Salud):
- El modelo se encuentra en buenas condiciones. La unidad no reconoció ningún problema.
-
![]() Calibration Finished (Calibración terminada):
Calibration Finished (Calibración terminada):
- La calibración del sensor se ha realizado correctamente.
-
![]() Governor was Engaged (Governor activo):
Governor was Engaged (Governor activo):
- El Governor logro alcanzar las RPM de consigna y esta activo desde este momento.
-
![]() Cyclic Ring Activated (Anillo de Cíclico Activo):
Cyclic Ring Activated (Anillo de Cíclico Activo):
- El Cíclico ha alcanzado su máximo ángulo de inclinación. Esto indica que el modelo fue incapaz de aplicar la corrección deseada. En la mayoría de los casos no es relevante. Es posible que el valor del parámetro de cyclic ring sea demasiado bajo y el modelo no pueda girar tan rápido como se pretende en los ejes de alerones/elevador. De manera alternativa, puede configurarse un valor más alto para los modos de vuelo de alta velocidad de giro. Es posible también que en vuelo a alta velocidad de translación se produzca un movimiento rápido de elevador. Se recomienda establecer este parámetro tan alto como sea mecánicamente posible.
 Rudder Limit Reached (Limite de Cola Alcanzado):
Rudder Limit Reached (Limite de Cola Alcanzado):
- El servo de cola alcanzó su límite configurado. Si este evento se produce antes o después de un vuelo no existe ningún problema. Si ve este mensaje durante el vuelo quiere decir que la cola no ha funcionado correctamente. En la mayoría de los casos será además visible durante el vuelo en forma de mala respuesta o pérdida temporal de la cola. Si el modelo se ha configurado correctamente, entonces podría ser debido a una baja eficiencia del rotor de cola, causada por ejemplo por la utilización de unas palas de cola muy cortas o bajas RPM. También existe la posibilidad de un problema mecánico o relacionado con unos límites escasos en el recorrido del paso del rotor de cola.
-
RPM Sensor data are too noisy (Datos del sensor RPM demasiado ruidosos):
- La lectura de RPM es muy inestable y oscila más de +/- 100 RPM. Los datos del sensor son inservibles para el Governor. Utilice blindaje adicional y monte un anillo de ferrita. Aumente el valor del parámetro RPM Sensor filter en el menú Expert settings dentro de la pestaña Advanced.
-
Received Frame was Corrupted (Trama de receptor corrupta):
- Trama recibida del receptor es inutilizable y se ignorará. En las mayoría de los casos no presenta ningún tipo de problema. Si el evento se produce a menudo, entonces la conexión entre el receptor puede estar mal o existe un exceso de ruido electromagnético. Verifique la calidad del enlace de radio y compruebe el cable entre la unidad y el receptor.
-
GeoLink function is imprecise (Funcionamiento impreciso del GeoLink):
- La función GeoLink no está funcionando correctamente. La brújula (magnetómetro) de su GeoLink puede requerir una nueva calibración. Asegúrese de que no existen motores, servos o imanes cerca del módulo GeoLink.
-
GeoLink Data were Corrupted (Datos GeoLink corruptos):
- La calidad de la comunicación con el GeoLink no es buena. Compruebe el cable entre el GeoLink y la unidad Spirit. Asegúrese de que no existen descargas electrostáticas que provengan the la correa de transmisión. Utilice el cable más corto que pueda.
-
 RPM Sensor data are lost (Datos del sensor RPM perdidos):
RPM Sensor data are lost (Datos del sensor RPM perdidos):
- La lectura de datos del sensor ha fallado - lo más probable es un mal funcionamiento del sensor de RPM. El sensor no envía datos durante 2 segundos o más. Asegúrese de que el cableado del sensor es correcto y de que el motor gire cuando active el motor.
-
Receiver Signal Lost (Señal de Receptor Perdida):
- La señal se perdió repentinamente. Este problema no debería ocurrir en ningún momento y debe ser resuelto antes de próximo vuelo. Podría haber un problema con el receptor y/o antenas de comunicación. Podría ser un cable del receptor defectuoso o una mala conexión entre la unidad y el receptor. En algunos casos puede ocurrir una pérdida de la señal debido a una descarga electrostática causada por la acumulación de electricidad estática, esto ocurre generalmente en helicópteros con transmisión por correa.
-
Main Loop Hang Occurred (Cuelgue del Bucle Principal de Control):
- El bucle de control principal se retrasó. Esto puede suceder cuando el cableado no es correcto o existe una interferencia de ruido eléctrico con la unidad, por ejemplo, de un BEC. Si cuando ocurre se está utilizando el software de configuración, podría significar que el enlace con la unidad Spirit es más lento de lo que debería ser.
-
Power Voltage is low (Tensión de Alimentación Baja):
- Tensión de alimentación inferior a 2.9V. Esto significa que debe utilizar un BEC de mayor potencia. En casos raros podría ser debido a conexiones defectuosas en los cables.
-
Vibration Level is very high (Nivel de Vibración muy Alto):
- El nivel de vibración ha alcanzado un nivel que no es normal y puede afectar a la integridad del helicóptero. Durante las maniobras 3D más duras, el evento puede ocurrir con más frecuencia.
-
GeoLink connection is broken (Conexión con el GeoLink Rota):
- La comunicación con el módulo GeoLink se ha parado repentinamente. Todas las funciones relacionadas con el GeoLink dejan de funcionar. Verifique el cable entre el GeoLink y la unidad Spirit. Asegúrese de que el LED del GeoLink no parpadee tras el aterrizaje.
-
Todos los registros se guardan como archivos PDF en el directorio Documentos.
5.3.4 REALTIME LOGGING
Spirit GT and Spirit GTR units feature Advanced Flight Logging capability. It is possible to record all variables and store hundreds of logs in embedded memory, view and share all data in a great detail.
See page RealTime Logging for more information.
5.4 SERVOS
Esta pestaña se utiliza para la configuración de los servos, asegúrese de utilizar las frecuencias de servo correctas así como las direcciones de funcionamiento.
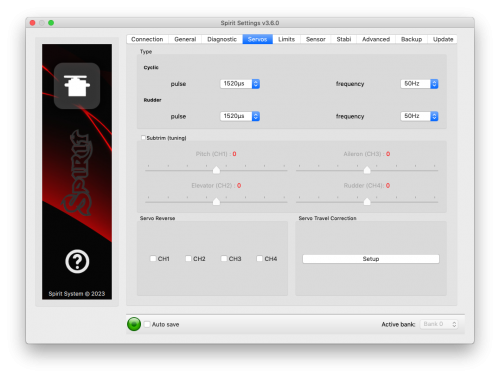
Tipo
En esta sección, establezca los valores de pulso neutro y frecuencia de acuerdo a las especificaciones del fabricante de sus servos. Para servos analógicos la frecuencia es por lo general como máximo de 60 Hz.Subtrim (tuning)
Idealmente, sin la cabeza del rotor instalada, utilice un nivelador de plato para alinear tanto el plato como los brazos de los servos de manera que ambos permanezcan perpendiculares al eje principal. Cualquier tipo de ajuste debe realizarse con el Sub Trim (tuning). Se pondrá la unidad Spirit FBL en un modo especial en el que la posición del paso colectivo será neutra, con los servos centrados. Además, se desactivará la estabilización. Puede ajustar los servos fácilmente en este momento. Al finalizar el proceso, el plato cíclico debe permanecer perfectamente perpendicular al eje principal, estando el paso colectivo a 0 ° (mida el ángulo en las palas mediante un medidor de paso).En la mayoría de los casos, también es necesario que los brazos se encuentren en este punto perpendiculares al eje principal. Todos los servos, CH1, CH2, CH3 y CH4, se ajustan mediante los controles individuales. CH1 y CH3 son los servos de alerón. CH2 controla el elevador y CH4 controla la cola.
También es necesario realizar un ajuste de subtrim en la cola, de manera que el brazo del servo quede perpendicular al re-envío y que el paso de cola quede a 0°. Este ajuste afectará a la calidad de las paradas de cola.
Una vez configurado, desactive la casilla Subtrim (tuning) para desactivar este modo especial.
Después de salir del modo especial, la estabilización y la cola funcionarán de nuevo. Asegúrese de que su canal de paso colectivo está configurado correctamente en su emisora. Debe ver valores de -100% a 100% en la pestaña de diagnóstico. Verifique que 0% en la pestaña de diagnóstico corresponden con la posición media de su stick colectivo/motor (utilizando una curva de paso lineal -100% + 100%).
Micro helicópteros y µSpirit: Cuando el rotor de cola cuente con su propio motor, el rendimiento del variador de cola se verá incrementado si utiliza la configuración Low RPM. Esto se puede configurar en Subtrim (CH4) - Low RPM - el valor afecta al rendimiento en el despegue y ayuda a obtener un funcionamiento simétrico en ambos sentidos de giro.
Servo reverse (Inversión servos)
Este menú le permite elegir qué servos deben tener su dirección de movimiento invertido. Movimientos en paso colectivo deben mover los tres servos en la misma dirección. Tras realizar los ajustes pertinentes, el modelo debe reaccionar correctamente al movimiento de los sticks. Este parametro es de gran importancia!Servo travel correction (corrección recorridos servo)
Aquí, usted es capaz de modificar el recorrido para cada servo individualmente. Algunos servos no son muy precisos en cuanto al recorrido en sus límites, esta imprecisión pueden tener un impacto negativo en las características de vuelo. Una vez en esta sección del software, la unidad cambia a un modo especial para hacer estas correcciones.Al terminar el paso anterior, Subtrim (tuning), el plato cíclico se ajustó a cero (0° de paso en las palas del rotor principal). El procedimiento es tal que debe usar un nivelador plato para determinar si hay alguna desviación en cualquiera de los servos en los puntos mínimo y máximo de paso colectivo. Existen ajustes separados para las posiciones mínima y máxima, - por ello existen 6 ajustes separados. Si el recorrido en alguno de los servos es menor del necesario, aumente el valor. Por el contrario, si es mayor, disminúyalo. Para activar los ajustes del segundo grupo, mueva el paso colectivo en dirección opuesta.
Esta corrección es útil también si existe una geometría asimétrica en el helicóptero causando problemas tales como la incapacidad de lograr los mismos valores de paso positivos y que negativos. En este caso, es necesario modificar los ajustes positivos o negativos para los tres servos. Si no está seguro acerca de la configuración, es mejor dejar los ajustes en su posición central. (posición 0)
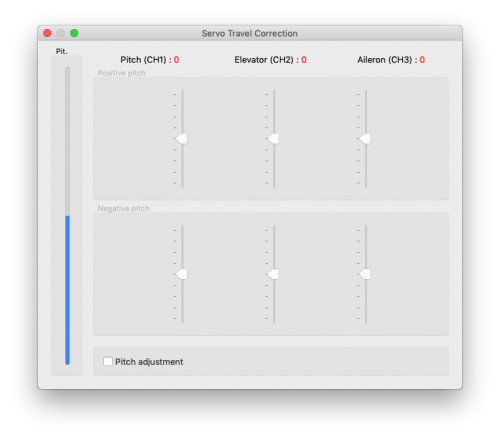
5.5 LIMITS (LIMITES)
Esta pestaña controla los límites y recorrido de los servos.

Cyclic Ring (tuning) (Anillo de Ciclico)
Este parámetro ajusta el anillo cíclico electrónico, que permite alcanzar los mayores rangos de cíclico sin llegar a forzar la mecánica (brazos de los servos, varillas y rótulas). Estos ajustes deben hacerse con mucho cuidado para evitar daños en el modelo o sus componentes electrónicos asociados. Nunca exceda los ángulos recomendados por el fabricante del modelo, si lo hace puede llegar a impactar con su pala en el tubo de cola.
En primer lugar, establezca su Recorrido de paso deseado, por ejemplo, +/-12°. Se recomienda utilizar una curva de paso lineal -100% a 100% en la emisora. Ahora es el momento de ajustar los límites de paso cíclico de Alerón/Elevador.
Trate de ajustar la mayor deflexión posible. Normalmente los límites en el paso cíclico serán igual o inferiores al paso colectivo. Este parámetro no afecta directamente a la velocidad de rotación, pero si es demasiado bajo, el modelo puede presentar movimientos de giro en elevador y alerón poco consistentes. Este ajuste se debe hacer con 0 ° de paso colectivo. Después mueva con cuidado el plato en todas las direcciones para garantizar que no se llegan a los límites mecánicos. Realice esta comprobación tanto con paso colectivo máximo como con paso mínimo.
Si se aumenta el rango de paso colectivo, se debe comprobar de nuevo este parámetro y, en algunos casos, ajustarlo para asegurar que no se fuerce ninguna pieza en sus nuevos máximos y mínimo de paso colectivo. Si el rango del anillo cíclico es insuficiente, es posible que se levante el morro de su helicóptero en vuelo nivelado a alta velocidad (incluso si la compensación pitch-up está en su valor máximo). Esto se debe a que el modelo no podrá compensar suficientemente por el bajo rango configurado.Rudder end-points (tuning) (Recorridos de cola)
Límite Izquierdo / Derecho - Ajusta la deflexión mínima y máxima de las palas del rotor de cola. Recomendamos que ambos valores se ajusten a los máximos mecánicos permitidos por el fabricante del helicóptero. Si no es así, el helicóptero puede que no sea capaz de controlar la cola durante las maniobras más exigentes, pudiéndola perder si esto ocurre. No exceda los valores máximos de su modelo. Micro helicópteros y µSpirit: Cuando se utiliza un motor separado para la cola, el variador de cola debe conectarse al canal CH4. Los límites de cola se utilizarán para adecuarse a los límites del variador de cola 0% (motor parado) a 100% (motor a pleno régimen). Se recomienda ajustar en un principio Stop limit a 126 y Full limit a 150.
5.6 SENSOR
Esta pestaña es la parte menos importante de los ajustes que se deben configurar.

Sensitivity (Sensibilidad)
El ajuste giratorio ajusta la sensibilidad del giróscopo para los ejes de alerón, elevador y cola.Cyclic gain (Ganancia de cíclico) – Cuanto más alto sea el valor, mayor será la precisión del bucle de control. El valor predeterminado se configura a 55% de ganancia, para la mayoría de los modelos se sugiere un valor óptimo de alrededor del 60%.
Rudder Common Gain (Ganancia principal de Cola) – 1.00x significa que no hay multiplicación. Este es el valor recomendado para helicópteros de clase 550 y más pequeños. Para helicópteros más grandes a menudo es más alto. 1.3x podría estar bien. La ganancia de giróscopo en su emisora debe ajustarse a un valor aproximado de 50% para el primer vuelo.
Rudder Gain (Ganancia Cola) – Este parámetro sólo se activa en caso de no tener asignado un canal de ganancia Gyro. Sustituye a la función de ganancia Gyro de su emisora, por lo que puede establecer directamente el valor en el software.
Puede ajustar la ganancia de cola en el software o en su emisora de la siguiente manera:
- Head-Lock mode(modo bloqueo cola): 1% a 100%
- Normal(Rate) (sin bloqueo cola o función especial): -100% a 0%
Se puede elegir una ganancia del giróscopo negativa para activar el modo rescate o estabilización - compruebe la pestaña Stabi.
Algunas emisoras tienen un rango de giróscopo de 0 a 100% donde el 50% es el medio - cero ganancia (por ejemplo, Spektrum DX6i). Otras emisoras usan un rango de -100% a 100%, donde 0% es el medio.
Rotation speed (Velocidad de rotación)
El valor por defecto es 8 y es adecuado para principiantes, cuanto mayor sea el valor, la velocidad de rotación de cíclico será mayor. Este factor depende también del ratio mecánico del varillaje o del D/R (Dual Rate) programado en la emisora, así como de los límites de Alerón/Elevador. Asegúrese de que el valor no es demasiado alto ya que puede producir movimientos no deseados o imprecisos.Valor predeterminado - 8
Recomendamos ajustar la velocidad de rotación de cíclico en el rango de 8 a 11. Recuerde que las cabezas de rotor DFC tienden a rotar más rápido, por lo que es mejor comenzar con un valor inferior para helicópteros equipados con este tipo de cabeza.
Para la velocidad de rotación de cola, el rango preferido por los pilotos suele ser 9 - 11.
5.7 STABI (ESTABILIZACION)
La unidad Spirit le ofrece la opción de los modos de estabilización y rescate. La función de estabilización, una vez activada, recuperará el modelo a una posición horizontal sin necesitar nada más por parte del piloto, pudiéndose utilizar para recuperar la posición cuando intente nuevas maniobras, pudiendo ayudar durante el proceso de aprendizaje.
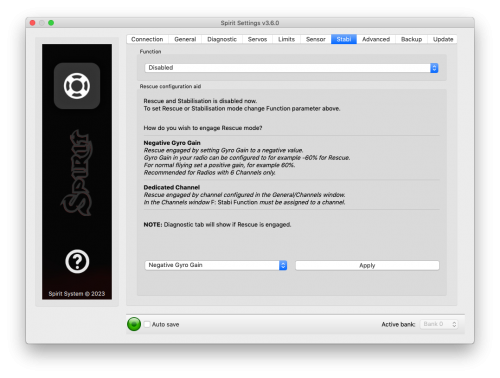
El modo de Rescate complementa la operación normal de la unidad Spirit. Una vez activado, el modelo se recuperará a una posición horizontal y aumentará el colectivo según la configuración. Esta función se puede utilizar en cualquier momento cuando el piloto pierde la orientación o el control del modelo.
Tan pronto como el piloto desactiva el modo Rescate el control se recupera inmediatamente.
El modo de Estabilización mantiene la horizontalidad del modelo una vez se sueltan los sticks, haciendo del vuelo una tarea fácil. Diferentes modos de estabilización se encuentran disponibles. El manejo del paso colectivo no se ve afectado en el modo de Estabilización.
El proceso de ajuste de los modos Rescate o Estabilización se describe en la página Modo Stabi. Existe un asistente de ajuste para el Rescate directamente en los ajustes Spirit. Vaya a la pestaña Stabi si la función se encuentra desactivada.
Puede activar laFunción seleccionada por dos métodos distintos:
- Ganancia de Gyro Negativa
- Canal Dedicado
El método de Ganancia de Gyro negativa es el adecuado para emisoras con un limitado número de canales (6 - 7). Si dispone de canales libres sin usar, el método de Canal Dedicado es mejor y más fácil.
El modo seleccionado actualmente se muestra en la pestaña de Diagnóstico.
Función
Aquí es donde se selecciona el modo que activa mediante ganancias de giróscopo negativas.- Disabled (Desactivado) - Normal (Rate) modo normal gyro.
- Rescue (Normal) - Recovers the model to an upright horizontal position – skids always to the ground. This recovery mode is great for beginners.
- Rescue (Acro) - Recovers the model to a horizontal position, inverted or upright, whichever is closer at the time of activation. For intermediatte and advanced pilots that are flying acrobatic maneuvers.
- Stabilization (Normal) - Modo de estabilización - patines siempre al suelo. Este modo es bueno para aprender los conceptos básicos tales como estacionario y transiciones lentas. El modelo es siempre llevado a posición horizontal.
- Stabilization (Acro) - Modo de estabilización - posición positiva o invertida, la más cercana en el momento de la activación. Este modo se utiliza para el aprendizaje de los conceptos básicos de maniobras acrobáticas. Si los sticks se dejan en el centro, el modelo tiene tendencia a volver a la posición horizontal.
- Stabilization (Scale) - Modo de estabilización - patines siempre al suelo. Este modo se utiliza para vuelo de maquetas. Modo de Gyro Normal (Rate).
- Coaxial - Modo de estabilización - en posición positiva o invertida, la más cercana en el momento de la activación. El comportamiento de la cola es muy similar a un helicópteros coaxial. Genial para hacer unas prácticas sin agobiarse.
- Rescue (Automatic) - Recovers the model to an upright horizontal position – skids always to the ground – whenever is model under defined Hard Deck altitude. Rescue must be activated when flying but upon reaching low altitude it will take control of the model automatically. During lift off and landing it must be turned off. This recovery mode is great for beginners.
Las funciones Rescate, Estabilización y GeoLink pueden verse afectadas por las condiciones del modelo. Antes de probarlas en vuelo lea por favor esta página.
El modo de rescate es muy exigente con el BEC. Asegúrese de que su BEC es suficiente para manejar este tipo de picos de corriente de alimentación de electrónica. En caso de que no sea suficiente, el modelo podría estrellarse! Nunca exceda los ángulos de paso recomendados por el fabricante del modelo, de lo contrario los mecanismos pueden sufrir daños durante el vuelo!
Rescue collective pitch (Paso Colectivo en Rescate)
Esto determina la rapidez con la que el modelo se recuperará a una posición horizontal. 100% significa el valor máximo de paso, el que se configuró en la pestaña Servos. Es muy importante comprobar si el modo de Rescate funciona correctamente antes del primer vuelo (en la mesa sin motor / rotores en marcha). El paso colectivo debe ser siempre positivo con el Rescate activado - mientras que el helicóptero está en el suelo.Sticks priority (Prioridad de los sticks)
Especifica la cantidad de control mientras que el modo configurado se activa. Cuanto mayor sea el valor, más va a reaccionar el modelo a los movimientos de los sticks.Direction control rate (Velocidad de Control Direccional)
Especifica la velocidad de control direccional para el modo de Estabilización. Valores bajos son adecuadas para principiantes, para obtener un comportamiento similar al de un helicóptero coaxial. Valores más altos son más apropiados para el vuelo de maquetas.Acro Delay (Retardo Acro)
Especifica el periodo de tiempo para el Rescate (Normal), cuando el modelo se recupera desde vuelo invertido. Hasta que el periodo de tiempo es alcanzado, el rescate tiene el mismo comportamiento que el rescate (Acro). De esta manera se consigue un ascenso hasta una altura segura de manera más rápida.Rescue Duration (Duración del Rescate)
Una vez el tiempo elegido pasa, el modo Rescate terminará y el modelo se quedará en vuelo estacionario. Para ello se utiliza el valor Hovering Collective Pitch. Este tiempo se cuenta desde que se activó el modo Rescate. El parámetro está disponible para ambos Rescue (Normal) y Rescue (Acro). La transición entre Rescate y estacionario se realiza de manera suave, y se realizará únicamente si el modo Rescate se encuentra todavía activo. El control del paso colectivo vuelve al piloto tan pronto como se ejecuta un movimiento del stick de paso.Hovering Collective Pitch (Paso Colectivo Estacionario)
Si el parámetro Rescue Duration se encuentra activo, tras él el modelo se quedará en vuelo estacionario. Para hacer que el modelo se mantenga en estacionario es necesario ajustar este parámetro. Si se ajusta muy bajo, el modelo descenderá en vez de mantenerse. Si se ajusta muy algo, el modelo ascenderá en vez de mantenerse. Se recomienda un valor alrededor del 40%.5.8 ADVANCED (AVANZADO)
Esta pestaña contiene configuraciones más avanzadas de la unidad Spirit. Se recomienda comprender completamente estos parámetros antes de ajustarlos. Se utiliza principalmente para ajustar la geometría. Otros parámetros, sin embargo, permiten ajustar el sistema a las preferencias del piloto.

Geometry 6° (tuning) (Geometria 6°)
Para un correcto funcionamiento de la unidad Spirit, es necesario configurar adecuadamente este parámetro. En este punto, la unidad se cambia a un modo especial para el ajuste de 6° de paso cíclico de las palas principales. Es necesario ajustar el valor de manera que el ángulo de las palas llegue a los 6° en el eje de alerón. Es necesario colocar el rotor con las palas alineadas con el tubo de cola del modelo. Al aumentar el valor se aumentará el ángulo; al reducirlo se disminuirá. Un ajuste óptimo se conseguirá cuando el valor se sitúe en el rango 90 - 160. Si no está en este rango, se recomienda ajustar la distancia la bola del brazo del servo o realizar otros ajustes mecánicos.Collective Direction (Dirección de Paso Colectivo)
Parámetro que ajustar la dirección del paso colectivo. En el caso de controlar el paso de la pala desde el borde de salida o si existen brazos de mezcla en el rotor, marque la opción Reversed option. En la mayoría de los casos el parámetro deberá dejarse sin marcar. Configurar este parámetro de manera correcta es sumamente importante, de lo contrario el paso colectivo funcionará al revés.
Elevator filter (Filtro de Elevador)
Este parámetro compensa el rebote de elevador durante maniobras agresivas. Cuanto mayor sea el valor, más compensación se aplica. Si este valor es demasiado alto puede llevar a una sensación suave "suelta" del elevador. Se recomienda utilizar el valor predeterminado de 1 para empezar.Cyclic feed forward (Pre-alimentación de Cíclico)
Este parámetro se utiliza para establecer la sensación de reactividad entre sus sticks y su modelo. Cuanto más alto sea el valor, más agresivo sentirá el modelo y más rápido reaccionará a los movimientos del stick. Si ajusta este valor demasiado alto puede causar un rebote en el eje de elevador. Si el modelo se siente como desconectado y hay un desfase entre las entradas del stick y la reacción del modelo, pruebe a aumentar este valor.Rudder delay (Retardo de Cola)
Este parámetro suaviza los movimientos de cola. También ayuda a estabilizar la cola - es una especie de amortiguación electrónica. Cuanto más rápido sea el servo, más bajo tendrá que ajustarse el retardo. Para servos analógicos se recomienda ajustar este valor en torno a 20-25. Para servos digitales lentos ajuste entre 10 - 15. Para servos muy rápidos (~0.04s/60°) el valor es 5. En el caso de un servo brushless se recomienda establecer un valor de 0-2. Si el valor es demasiado alto, la cola podría comenzar a oscilar o observarse paradas de cola lentas e imprecisas.Rudder dynamic (Dinámica de cola)
Si la cola no se detiene correctamente, por ejemplo, para más tarde de lo que debiera, este parámetro ayuda a corregirlo.6 - es el valor predeterminado.
Cuanto mayor sea el valor, más agresivo es el comportamiento de la cola. Si la cola para más tarde de lo que debiera, el valor es demasiado alto. Este parámetro también afecta a la velocidad de respuesta del movimiento del stick; un valor más alto significa una respuesta más rápida. Si no puede llegar a obtener una parada similar en ambos lados, asegúrese de que el centrado del mecanismo de cola es correcto en 0°. De manera alternativa, puede bajar el límite de cola para ese lado.
Rudder – Revomix
Revomix (pre-compensación de cola) añade cola por defecto ante los cambios del paso colectivo, cuando la cola necesita sujetar el par del rotor principal. Revomix es independiente de la emisora. Por defecto está desactivado, el usuario debe ajustar la cantidad requerida de la pre-compensación.Los valores permitidos son 0 a 10 donde 0 es desactivado; en la mayoría de los casos no es necesario el uso de este parámetro, sin embargo, si utiliza bajas rpm de rotor o en helicópteros con poca potencia de cola, utilice este parámetro.
Pirouette consistency (Consistencia de pirueta)
Este parámetro ajusta la consistencia de las piruetas de cola y su capacidad de mantenimiento. Si las piruetas de cola no son consistentes durante ciertas maniobras, aumente el valor de este parámetro. Este valor es particular para cada modelo, depende de muchos factores como: su mecánica de cola, velocidad del rotor, etc. Antes de configurar este parámetro, se recomienda ajustar primero las ganancias del giróscopo. Si el valor es demasiado alto, la cola puede oscilar. También puede causar malas paradas de la cola. Este valor debe estar entre 150 y 180. Para servos brushless se recomienda aumentar el valor por unos 10-15 puntos.
5.8.1 EXPERT SETTINGS (AJUSTES PARA EXPERTOS)
Para una puesta a punto fina se ajustar los siguientes parámetros. Normalmente no es necesario ajustar estos parámetros.
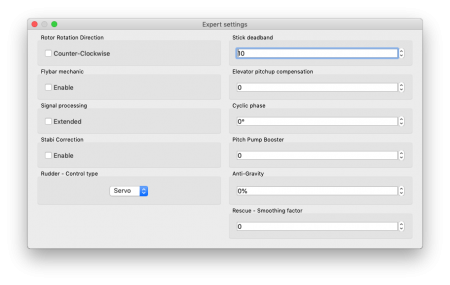
Rotor Rotation Direction (Dirección de giro del rotor)
Parámetro para determinar la dirección de rotación del rotor principal. En la mayoría de los casos es en sentido horario - parámetro desmarcado.Stick deadband (Zona muerta del stick)
Determina la zona alrededor de la posición neutra del stick, en la que el sistema no reconoce ningún movimiento del mismo. Si las lecturas del canal son imprecisas aumente el valor. Esto se puede comprobar en la pestaña Diagnostics. Este parámetro no reemplaza la función exponencial.Elevator pitchup compensation (Compensación de morro arriba)
Si durante el vuelo rápido en traslación el modelo reacciona a las entradas demasiado rápido o si el modelo tiende a levantar el morro, aumente este valor hasta que esto ya no ocurra. Si el helicóptero levanta el morro repentinamente, esto podría ser debido a un bajo recorrido de cíclico y/o a un excesivo paso colectivo. En este caso, aumente los recorridos de Alerón/Elevador tan alto como sea posible sin forzar los mecanismos. Si esto no soluciona el problema, puede aumentar más la compensación de morro arriba.Cyclic phase (Fase de cíclico)
El valor indica el ángulo de desfase virtual del plato cíclico. Por ejemplo, un valor de 90 hará que se aplique alerón a comandos de elevador. Este ajuste es útil para rotores con cabeza multi-pala. Para la mayoría de los otros modelos, se recomienda un valor de cero.Pitch Pump Booster (Amplificación de colectivo)
Para lograr un comportamiento del paso colectivo similar al de rotores con flybar, incremente el valor hasta que se alcance el tacto deseado. Recuerde que valores altos son demasiado exigentes para la alimentación de la electrónica y los servos.Anti-Gravity
You can equalize throw for a positive and negative pitch. So that pilot can feel it flys similarly fast up and down. With increased value pitch difference for positive and negative collective will enlarge. It also calculate such difference based on attitude of the model. When it is skids down Anti-Gravity apply in an inverted manner. In other words pilot will feel that the model is lighter in the air. Recommended rather for a smaller models.Rescue - Smoothing factor
To reduce demand for model mechanics please increase the value. It will make a slower movements to reduce current spike and possible overload of the BEC/battery. This will increase safety of the Rescue maneuver, however too high value will result in a slower recovery.Signal processing (Procesamiento de señal)
Este parámetro se utiliza para la operación en modelos con vibraciones extremas que no pueden ser eliminadas de otra forma. Aumenta la precisión en los modos Rescate/Estabilización/GeoLink si los ajustes por defecto no son satisfactorios. Por ejemplo, si los modos Rescate o Estabilización mantienen una inclinación constante en alguno de los ejes tras su activación incluso en maniobras básicas, active este parámetro.Flybar mechanic (Flybar mecánico)
Si el helicóptero está equipado con un rotor tradicional con flybar, habilite este parámetro con el fin de utilizar los modos de Estabilización o Rescate. Todos los ajustes son los mismos para helicópteros con flybar excepto este parámetro. Los helicópteros flybarless deben configurarse y operarse con el parámetro Flybar mechanic desactivado.
RPM Sensor Filter (Filtro de sensor RPM)
En caso de que su sensor de RPM presente una salida ruidosa el valor de RPM puede ser muy inestable. Esto puede dar lugar a diversos problemas con el Governor. Puede haber un problema durante el arranque, cambio de modo de vuelo o inestabilidad en el mantenimiento de las rpm del rotor. Para aumentar la precisión de lectura de las RPM, aumente el valor del parámetro. Por otro lado, un valor demasiado alto puede producir retrasos, que no son buenos para un funcionamiento óptimo del Governor. Por lo cual, el valor debe ser tan bajo como sea posible mientras que la lectura de RPM siga siendo precisa. Variaciones de 1-20 RPM respecto de las RPM de consigna se consideran como óptimas.Autorotation Bailout rate (Tasa de Rescate de Autorotación)
Cuando se realiza una autorotación, la función de rescate está disponible. El rescate se utiliza para recuperar las RPM del rotor más rápido de lo normal con el fin de lograr RPM útiles pronto. De esta manera el piloto puede recuperar el control total del modelo y continuar con el vuelo. Si utiliza el Governor del Spirit puede utilizar este parámetro para ajustar de manera precisa la velocidad con la que se recuperan las RPM durante el rescate de autorotación. Cuando el Governor del Spirit está desactivado, esta configuración no tiene ningún efecto.Rudder - Control Type (Tipo de control de cola)
En las unidades µSpirit es posible activar el soporte de motores dedicados para rotor de cola. En este caso se utilizarán dos variadores, el variador del motor de cola se conecta al puerto CH4. Es importante ajustar Limits/Rudder ESC - range adecuadamente ya que así se define el rango de funcionamiento del variador de cola entre 0 y 100%. Este parámetro se encuentra normalmente en el Asistente de Ajuste.Stabi Correction (Corrección Stabi)
Active este parámetro si el Rescate, Estabilización o GeoLink no son precisos con los ajustes por defecto. Actívelo únicamente si el modelo se encuentra en buenas condiciones. Adecuado para pilotos volando figuras complicadas. Este modo ofrece el mejor rendimiento en cualquier tipo de maniobra. El único requisito para ser utilizado es que el modelo no tenga ningún tipo de vibración que pueda afectar al sistema. Si no está seguro, utilice Vibration Analysis para comprobar las vibraciones o consúltelo con nosotros.5.8.2 TELEMETRY SETTINGS (AJUSTES DE TELEMETRIA)
La Telemetría de Variador activa la transmisión de variables de telemetría desde el variador a su emisora. Descrito en la página de Telemetría de Variador.
5.9 BACKUP (COPIA DE SEGURIDAD)
Aquí puede guardar la configuración de su unidad Spirit antes de apagarla, también puede guardar la configuración en su ordenador por si necesitase cargarla de vuelta en un futuro.

Profile (Perfil)
Esta sección le permite Save (Guardar) y Load (Cargar) configuraciones completas de la unidad a/de un archivo específico. Si tiene más de una unidad del mismo modelo, no es necesario llevar a cabo una configuración completa de nuevo, sólo tiene que cargar los ajustes almacenados mediante el botón Load (Cargar).Unit (Unidad)
Cualquier cambio en la configuración se pueden guardar en cualquier momento en la memoria flash interna de la unidad. Para restablecer todos los ajustes a los valores de fábrica, haga clic en Factory Settings. Recuerde guardar los ajustes cada vez que desee almacenar la configuración de forma permanente. Debe pulsar el botón Save (Guardar). De lo contrario, los cambios se perderán una vez la unidad Spirit se apague.
Bank Switching (Conmutación de banco)
En caso de tener habilitada la Conmutación de banco, puede guardar la configuración de un solo banco o incluso de todos. Para ver las diferencias entre bancos puede utilizar la función de comparación de banco.5.10 UPDATE TAB (Actualización)
Si desea actualizar el firmware de su unidad, puede hacerlo en esta pestaña.

Firmware
Primero, seleccione el archivo de datos que contiene el firmware (*.4df) - Select button (Botón de selección). Una vez seleccionado el archivo, presione Flash button. El progreso de la actualización se mostrará aquí. Una vez terminado, un diálogo de confirmación aparecerá indicando la correcta actualización. A continuación, desenchufe la unidad de su fuente de alimentación. En el siguiente arranque, la unidad cargará el firmware que acaba de actualizar.You can restart the Spirit Settings software when unit will reinitialize and continue with setup.
La configuración de la unidad no se toca durante el proceso de actualización, por lo cual no es necesario hacer una copia para luego restaurarla.
Firmware update can be made only with Internet Connection. It is downloaded automatically from Spirit Server.
6 BANK SWITCHING (CAMBIO DE BANCO)
Esta funcionalidad le permite cambiar en vuelo entre varios ajustes guardados. La conmutación se realiza desde su emisora mediante el estado de un canal. Esto significa que un banco puede almacenar una cierta configuración. La unidad es capaz de almacenar 3 bancos diferentes.
Para cambiar libremente entre los bancos puede utilizar un interruptor de tres posiciones.
La capacidad de cambio de banco está desactivada por defecto, por lo cual usted puede decidir si le resulta útil o no. Debe activarla asignando la función 'Bank en la pantalla General/Channels. Generalmente, se asigna al canal 7.
- Bank 0 – activo en el rango del tercio inferior (por debajo 1400μs).
- Bank 1 – activo en el rango del tercio intermedio (entre 1400μs y 1640μs).
- Bank 2 – activo en el rango del tercio superior (superior a 1640μs).
Los ajustes iniciales para el Banco 1 y Banco 2 son los mismos que para el Banco 0. El Banco 0 le permite configurar todos los parámetros, mientras que Banco 1 y 2 no permiten ajustar los parámetros principales, que permanecerán comunes a los tres. Por razones de seguridad, el Banco 1 y 2 no le permiten establecer ninguno de los parámetros principales.
El cambio de Banco es ideal para cambiar entre estilos de vuelo, ajustar las ganancias de los sensores a RPM bajas o altas, para acrobacias suaves o 3D. Como alternativa se puede utilizar sólo para afinar los ajustes.
Si la unidad se encuentra conectada al ordenador o a una emisora completamente integrada estando en el menú de ajuste, el cambio de Banco desde la emisora estará temporalmente deshabilitado. Si desea cambiar de Banco en estas condiciones, lo puede hacer pulsando el botón a tal efecto en la parte inferior de la ventana del software o emisora.
Cuando se cambia de Banco desde el software, es necesario guardar los parámetros modificados antes de cambiar de Bancos, si no es así los cambios realizados se perderán, volviendo al anterior estado.
Cierre siempre el software o cualquier app conectada antes de volar. Si no lo hace, no podrá cambiar de Banco en vuelo.
Para comprobar que el cambio de Banco funciona correctamente, inicie el software y observe la pestaña de diagnóstico. Allí usted puede ver el indicador del Banco con el valor de su canal. Intente cambiar la posición del interruptor asignado. Si todo está correcto, verá que el número de banco cambiará.
7 GOVERNOR
El Governor es una función que le ayuda a mantener constantes las RPM de su rotor. Puede usare esta función en vez del governor interno de su variador u otro tipo de governor. Está diseñado para funcionar con helicópteros eléctricos, nitro y gasolina. El rendimiento de su motor puede ser incluso mejor al utilizar Governor.
Para lograr un buen funcionamiento es muy importante realizar una configuración correcta. Antes de nada, asegúrese que el governor de su variador se encuentra desactivado.
Es necesario retirar las palas de su modelo antes de realizar la configuración del governor. No haga ningún ajuste con el motor encendido.
Es necesario utilizar la salida de Throttle (motor) de la unidad cuando se utilice el Governor de su Spirit.
Lista de sensores de rpm soportados y su cableado disponible en la página Governor .
8 CONTROL DEL SOFTWARE MEDIANTE TECLADO
Para una configuración más rápida y fácil se han implementado en el software los controles mediante teclado.
Atajo Función F1 a F10 Cambiar entre pestañas. ESC Salida ventana actual. CTRL + S Guardar configuración en unidad. CTRL + P Guardar configuración en su ordenador. CTRL + L Cargar a la unidad una configuración desde su ordenador. CTRL + W Configuración de conexión para el módulo wifi-link. Numpad 0, 1, 2 Cambiar entre bancos. Tab Cambiar entre parámetros. Space Selección de parámetro / opción. Flechas Incrementar / Disminuir valores. Av Pag / Re Pag Aumentar / disminuir el valor por decenas. Inicio Establecer el valor más bajo. Fin Establecer valor mas alto.
-








